Техническая механика определить реакции стержней. Стержневые системы - реферат. Примеры решения задач
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей).
Все связи можно разделить на несколько типов.
Связь - гладкая опора (без трения).Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рис. 1.7).
Гибкая связь (нить, веревка, трос, цепь). Груз подвешен на двух нитях (рис. 1.8).
Из-за того, что рассасывающиеся прокладки демонстрируют жесткость, близкую к жесткости костной ткани, их использование при иммобилизации трещин позволяет значительно уменьшить экранирование стресса. Первоначальная стабильность подходит для процесса заживления, постепенная постепенная резорбция, позволяющая постепенно переносить стресс на окружающие ткани.
Связи и их реакции
Другим преимуществом резорбируемых пластин является их радиопрозрачность. С другой стороны, наиболее инкриминируемыми осложнениями иммобилизации с рассасывающимися пластинами остеосинтеза являются образование фистулы, остеолиз на месте введения бляшек и поздние реакции организма.
Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Жесткий стержень.
На схемах стержни изображают толстой сплошной линией (рис. 1.9).
Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня.
Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи.
Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент наложенными на него связями.
Убираем стержень 1, в этом случае стержень 2 падает вниз. Следовательно, сила от стержня 1 (реакция) направлена вверх. Убираем стержень 2. В этом случае точка А опускается вниз, отодвигаясь от стены. Следовательно, реакция стержня 2 направлена к стене.
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки) (рис. 1.10).
Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допускается только перемещение поперек опорной поверхности.
Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Её принято изображать ввиде двух составляющих: горизонтальной и вертикальной (R x , Ry) (рис. 1.11).
Защемление или «заделка». Любые перемещения точки крепления невозможны.
Под действием внешних сил в опоре возникают реактивная сила и реактивный момент М R , препятствующий повороту (рис. 1.12).
Реактивную силу принято представлять в виде двух составляющих вдоль осей координат
R = R x + R y
Примеры решения задач
Последовательность решения задач:
- Выбрать тело (точку), равновесие которого следует рассматривать.
- Освободить тело (шарнир) от связей и изобразить действующие на него активные силы и реакции отброшенных связей. Причем реакции стержней следует направить от шарнира, так как принято предполагать, что стержни растянуты.
- Выбрать оси координат и составить уравнения равновесия, используя условия равновесия системы сходящихся сил на плоскости ∑Xi = 0; ∑Yi = 0. Выбирая оси координат, следует учитывать, что полученные уравнения будут решаться проще, если одну из осей направить перпендикулярно одной из неизвестных сил.
- Определить реакции стержней из решения указанной системы уравнений.
- Проверить правильность полученных результатов, решив уравнения равновесия относительно заново выбранных координат х и у.
Пример 1. Груз подвешен на стержнях и канатах и находится в равновесии (рис. 1.13). Изобразить систему сил, действующих на шарнир А.
Решение
1. Реакции стержней направлены вдоль стержней, реакции гибких связей направлены вдоль нитей в сторону натяжения (рис. 1.13, а).
2. Для определения точного направления усилий в стержнях мысленно убираем последовательно стержни 1 и 2. Анализируем возможные перемещения точки А.
Неподвижный блок с действующими на него силами не рассматриваем.
3. Убираем стержень 1, точка А поднимается и отходит от стены, следовательно, реакция стержня 1 направлена к стене.
4. Убираем стержень 2, точка А поднимается и приближается к стене, следовательно, реакция стержня 2 направлена от стены вниз.
5. Канат тянет вправо.
6. Освобождаемся от связей (рис. 1.13, б).
Пример 2. Шар подвешен на нити и опирается на стену (рис. 1.14а). Определить реакции нити и гладкой опоры (стенки).
Решение
1. Реакция нити - вдоль нити к точке В вверх (рис. 1.14, б).
2. Реакция гладкой опоры (стенки) - по нормали от поверхности опоры.
Пример 3. Представим, что на горизонтально расположенный брус АБ, собственной массой которого пренебрегаем, действует вертикальная нагрузка F, приложенная в точке С бруса (рис. 1.14-1, а). Левый конец бруса А прикреплен к опоре шарниром, а правый В опирается на гладкую наклонную плоскость.
Изобразим брус схематично отрезком АВ, как на рис. 1.14-1, б, и приложим к нему в точке С вертикальную силу F. В точке В со стороны наклонной плоскости к брусу приложена ее реакция R B , направленная перпендикулярно плоскости; линии действия сил F и R B пересекаются в точке О. Кроме этих сил на брус действует еще одна сила - реакция шарнирно-неподвижной опоры. А так как брус находится в равновесии, то линия действия третьей силы также пройдет через точку О, т. е. реакция R шарнир-но-неподвижной опоры направлена вдоль отрезка АО.
Примененный здесь метод рассуждения называется принципом освобождения тела от связей и замены связей их реакциями.
Пример 4. Определить усилие в стержне CD и силу давления груза А на опорную плоскость EF (рис. 1.14-2, а). Массой стержня CD, блока К, каната и трением каната о блок пренебречь.
Решение
Натяжение каната во всех его точках одинаково и равно силе тяжести груза В, так как неподвижный блок изменяет только направление силы, действующей на канат.
Рассмотрим равновесие системы: стержень CD и блок К ML. Отбросим связи и заменим их действие соответствующими реакциями (рис. 1.14-2, 6). Для полученной системы сил можно составить только одно уравнение равновесия:
На рис. 1.14-2, в показаны силы, действующие на груз А с прилегающим к нему отрезком каната ОН. R EF - реакция опорной плоскости.
Так как груз А находится в равновесии, то
R еf = Pa – Рв = 600 – 400 = 200 Н.
Сила давления груза А на опорную плоскость RA показана на рис, 1.14-2, г. Очевидно, R A = R EF = 200 H (сила действия равна силе противодействия).
Пример 5. Определить реакции стержней, удерживающих грузы F 1 = 70 кН и F 2 = 100 кН (рис. а). Массой стержней пренебречь.
Решение
1. Рассматриваем равновесие шарнира В (рис. а).
2. Освобождаем шарнир В от связей и изображаем действующие на него активные силы и реакции связей (рис. б).
3. Выбираем систему координат, совместив ось у по направлению С реакцией R 2 (рис. б) и составляем уравнения равновесия для системы сил, действующих на шарнир В:
3. Определяем реакции стержней R 1 и R 2 , решая уравнения.
Подставляя найденное значение R 1 в уравнение (2), получаем
Знак минус перед значением R 2 указывает на то, что первоначально выбранное направление реакции неверное - следует направить реакцию R 2 в противоположную сторону, т.е. к шарниру В (на рис. б истинное направление реакции R 2 показано штриховым вектором).
5. Проверяем правильность полученных результатов, выбрав новое расположение осей координат х и у (рис. а). Относительно этих осей составляем уравнения равновесия:
Значения реакций R 1 и R 2 , полученные при решении уравнений (1) и (2), совпадают по величине и направлению со значениями, найденными из уравнений (3) и (4), следовательно, задача решена правильно.
Контрольные вопросы и задания
1. Какая из приведенных систем сил (рис. 1.15) уравновешена?
3. Тела 1 и 2 (рис. 1.17) находятся в равновесии. Можно ли убрать действующие системы сил, если тела абсолютно твердые? Что изменится, если тела реальные, деформируемые?
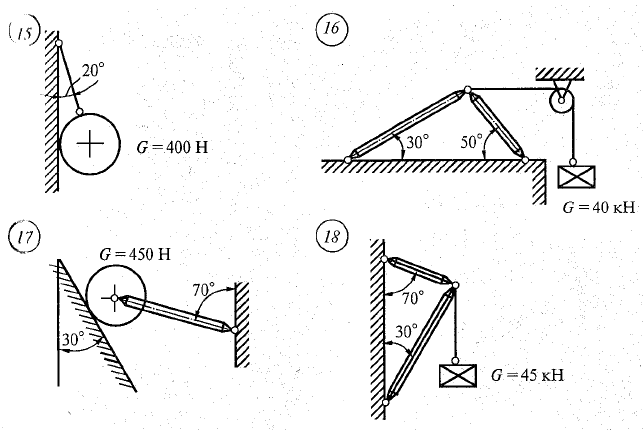
4. Укажите возможное направление реакций в опорах (рис. 1.18).
Практическая работа 1
Тема: Определение реакций связей аналитическим и графическим способами.
Цель: Изучить виды связей, научиться определять их реакции.
Теоретическая часть:
Тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным .
Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным .
Все то, что ограничивает перемещения данного тела в пространстве, называется связью .
Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции связи или реакцией связи .
Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу.
Аксиома связей. Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
Все виды связей можно разделить на несколько типов.
1. Связь – гладкая опора (без трения).
Рисунок 1.1
Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рисунок 1.1).
2. Гибкая связь (нить, веревка, трос, цепь).
Реакция нити направлена вдоль нить от тела, при этом нить может быть только растянута (рисунок 1.2).

Рисунок 1.2
3. Жесткий стержень.
Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи (рисунок 1.3).

Рисунок 1.3
4. Шарнирная опора.
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир . Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т.к. не допускается только перемещение поперек опорной поверхности
(рисунок 1.4).

Рисунок 1.4
Неподвижный шарнир. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Её принято изображать в виде двух составляющих: горизонтальной и вертикальной (рисунок 1.5).

Рисунок 1.5
5. Защемление или «заделка».
Любые перемещения точки крепления невозможны.
Реактивную силу принято представлять в виде двух составляющих вдоль осей координат (рисунок 1.6).

Рисунок 1.6
Пример.
Грузы подвешены на стержнях и канатах и находятся в равновесии. Определить реакции стержней АВ и СВ (рисунок 1.7).


Рисунок 1.7
1. Аналитический способ.
1. Определяем вероятные направления реакций. Мысленно убираем стержень АВ, при этом стержень СВ опускается, следовательно, точка В отодвигается от стены: назначение стержня АВ – тянуть точку В к стене.
Если убрать стержень СВ, точка В опустится, следовательно, стержень СВ поддерживает точку В снизу – реакция направлена в верх.
2. Освобождаем точку В от связи.
3. Выберем направление осей координат, ось Ох совпадает с реакцией .
4. Запишем уравнения равновесия точки В:
5. Из второго уравнения получаем:
Из первого уравнения получаем:
2. Графический способ.
1. Выбираем масштабный коэффициент сил: µ = 1 Н/мм
Определяем отрезки, изображающие силы и :
![]() ,
,
![]() .
.
2. Полученная система сил находится в равновесии, поэтому силовой
многоугольник должен быть замкнутым (рисунок 1.8).

Рисунок 1.8
3. Вычисляем реакции и , полученные в результате графического
Вычисляем погрешности:
![]() .
.
Задание.
Аналитически и графически определить реакции связей, сравнить результаты.







Контрольные вопросы.
1. Что называется связью?
2. Перечислите основные виды опор.
3. Запишите аксиому связей.
4. Как направлена реакция гибкой нити?
1. Схема фигуры в масштабе
2. Решение
3. Ответы на контрольные вопросы
Практическая работа № 2
Тема: Определение реакций опор двух опорной балки.
Цель работы: Научится определять реакции опор балки установленной на двух опорах.
Теоретическая часть:
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).

Величина проекции силы на ось
равна произведению модуля силы на косинус угла между вектором силы и положительным направлением
оси. Таким образом, проекция имеет знак: положительный при одинаковом направлении
вектора силы и оси и отрицательный
при направлении в сторону отрицательной полуоси
(рис. 3.2).

F 1x = F 1 cos α 1 > 0; F 2x = F 2 cos α 2 = - F 2 cos β 2 ;
cos α 2 = cos (180° - β 2)= - cos β 2
F 3x = F 3 cos90° = 0; F 4x = F 4 cos180° = - F 4 .
Проекция силы на две взаимно перпендикулярные оси (рис. 3.3).

Определение равнодействующей системы сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом.
Выберем систему координат, определим пропорции всех заданных векторов на эти оси (рис. 3.4, а).
Складываем проекции всех векторов на оси х и у (рис. 3.4, б).
![]()