テクニカルメカニクスがロッドの反応を決定します。 ロッド システム - 抽象的。 問題解決の例
結合が反応によって置き換えられれば、結合された身体は自由であると想像できます (結合からの解放の原理)。
すべての接続はいくつかのタイプに分類できます。
接続~スムーズなサポート(摩擦はありません)。 サポート反力はサポート点で適用され、常にサポートに対して垂直に向けられます。(図1.7)。
柔軟なコミュニケーション(糸、ロープ、ケーブル、チェーン)。 負荷は 2 つのスレッドで中断されます (図 1.8)。
吸収性パッドは骨組織と同様の剛性を示すため、骨折の固定に使用すると応力シールドが大幅に低下する可能性があります。 初期の安定性は治癒プロセスに適しており、徐々に徐々に吸収され、ストレスが周囲の組織に徐々に伝達されます。
接続とその反応
吸収性プレートのもう 1 つの利点は、X 線透過性です。 一方、吸収性骨接合プレートによる固定化で最も問題となる合併症は、瘻孔の形成、プラーク挿入部位での骨溶解、および身体の後期反応です。
糸の反力は糸に沿って体から離れる方向に向けられ、糸は伸びることしかできません。
硬いロッド。
図では、ロッドは太い実線で示されています (図 1.9)。
ロッドは圧縮または伸張することができます。 ロッドの反応はロッドに沿って方向付けられます。
ロッドは引張または圧縮で動作します。反応の正確な方向は、心の中でロッドを取り外し、この接続がない場合の身体の動きを考慮することによって決定されます。
点の可能な動きは、その点に課せられたつながりによって特定の瞬間に許容される非常に小さな精神的な動きです。
ロッド 1 を取り外します。この場合、ロッド 2 が落ちます。 したがって、ロッド1からの力(反力)は上向きになります。 ロッド 2 を取り外します。この場合、ポイントは あ落ちて壁から遠ざかります。 その結果、ロッド 2 の反力は壁に向けられます。
ヒンジにより、取り付けポイントを中心に回転できます。 ヒンジは2種類あります。
可動ヒンジ。ヒンジに取り付けられたロッドはヒンジを中心に回転し、取り付け点はガイド(プラットフォーム)に沿って移動できます(図 1.10)。
可動ヒンジの反力は、支持面を横切る移動のみが許可されないため、支持面に対して垂直に向けられます。
固定ヒンジ。 接続点は移動できません。 ロッドはヒンジ軸の周りを自由に回転できます。 このようなサポートの反力はヒンジ軸を通過しますが、その方向は不明です。 通常、水平方向と垂直方向の 2 つのコンポーネントの形式で表されます ( Rx、Ry) (図1.11)。
つまむことまたは「密閉」。接続点を移動することはできません。
外力の影響下で、サポートに反力と反力モーメント M R が発生し、回転が妨げられます (図 1.12)。
反力は通常、座標軸に沿った 2 つの成分として表されます。
R = R x + R y
問題解決の例
問題解決の順序:
- 平衡を考慮する必要がある物体 (点) を選択します。
- ボディ (ヒンジ) を接続から解放し、それに作用するアクティブな力と、破棄された接続の反応を描写します。 さらに、通常、ロッドは伸ばされていると想定されるため、ロッドの反作用はヒンジから導かれる必要があります。
- 座標軸を選択し、平面 ∑Xi = 0 上の収束力系の平衡条件を使用して平衡方程式を作成します。 ∑Yi = 0。座標軸を選択するときは、軸の 1 つが未知の力の 1 つに対して垂直に向いていると、結果の方程式がより簡単に解けることを考慮する必要があります。
- 示された連立方程式の解からロッドの反応を決定します。
- 新しく選択した座標 x および y に関して平衡方程式を解くことによって得られた結果が正しいかどうかを確認します。
例 1. 荷重はロッドとロープに吊り下げられ、平衡状態にあります (図 1.13)。 ヒンジに作用する力の系を描く A.
解決
1. ロッドの反力はロッドに沿って方向付けられ、フレキシブル接続の反力は糸に沿って張力の方向に方向付けられます (図 1.13、a)。
2. ロッドにかかる力の正確な方向を決定するには、心の中でロッド 1 とロッド 2 を順番に取り外し、ポイントの考えられる動きを分析します。 A.
力が作用する静止ブロックは考慮しません。
3. ロッド 1、ポイントを取り外します。 あが上昇して壁から離れるため、ロッド 1 の反力は壁に向けられます。
4. ロッド 2、ポイントを取り外します。 あロッド 2 は上昇して壁に近づくため、ロッド 2 の反力は壁から下に向けられます。
5. ロープは右に引っ張られます。
6. つながりから解放されます (図 1.13、b)。
例2。ボールは糸で吊り下げられ、壁に置かれます (図 1.14a)。 糸と滑らかなサポート (壁) の反応を決定します。
解決
1. 糸の反応 - 糸に沿ってポイントまで で(図 1.14、b)。
2. 滑らかな支持体 (壁) の反応 - 支持体表面に垂直。
例 3.水平に配置された梁上でそれを想像してみましょう AB、自身の質量を無視すると垂直荷重が作用します F、ある時点で適用される と木材 (図 1.14-1、 A)。梁の左端 あヒンジでサポートに取り付けられており、右側 で滑らかな傾斜面の上にあります。
ビームをセグメントで概略的に描いてみましょう AB、図のように。 1.14-1、 b、そしてそれをポイントに適用します と垂直力 F.時点で で傾斜面側からその反力が梁に加わる RB、平面に対して垂直に向けられる。 力の作用線 Fそして RB点で交差する について。これらの力に加えて、ヒンジで固定されたサポートの反力という別の力がビームに作用します。 そしてビームは平衡状態にあるので、第三の力の作用線もその点を通過します。 について、つまり反応 Rヒンジ付き固定サポートはセグメントに沿って方向付けられます JSC。
ここで使用される推論方法は次のように呼ばれます。 身体をつながりから解放し、つながりをその反応に置き換える原理。
例4.ロッドにかかる力を決定する CDと負荷圧力 あ基準面まで E.F.(図 1.14-2、a)。 ロッド質量 CD、ブロック に、ロープとブロック上のロープの摩擦は無視されます。
解決
ロープの張力はすべての点で同じであり、荷物の重力に等しい で、固定ブロックはロープに作用する力の方向を変えるだけなので。
システムの平衡を考慮してください: ロッド CDそしてブロックする に M.L.接続を破棄し、そのアクションを対応する反応に置き換えましょう (図 1.14-2、6)。 結果として得られる力の系については、次の 1 つの平衡方程式のみを作成できます。
図では、 1.14-2、荷重に作用する力を示します。 あ隣接するロープで 彼。 参照 -基準面の反応。
負荷がかかっているので、 あ平衡状態にある場合、
R ef = Pa – Рв = 600 – 400 = 200 N。
荷重 A による支持面 RA への押圧力は図 1.14-2 の d に示されており、 R A = R EF = 200 N (作用力と反力は等しい) であることがわかります。
例5。荷重 F 1 = 70 kN および F 2 = 100 kN を保持するロッドの反応を決定します (図 a)。 棒の質量は無視します。
解決
1. ヒンジ B の平衡を考慮します (図 a)。
2. ヒンジ B を接続から解放し、ヒンジ B に作用する接続のアクティブな力と反力を示します (図 b)。
3. y 軸を反力 R2 の方向 C に合わせて座標系を選択し (図 b)、ヒンジ B に作用する力の系の平衡方程式を作成します。
3. 方程式を解いてロッド R 1 と R 2 の反応を決定します。
見つかった R 1 の値を式 (2) に代入すると、次のようになります。
R2 値の前のマイナス記号は、最初に選択された反応方向が間違っていることを示します。R2 反応は反対方向に向けられる必要があります。 ヒンジ B に接続します (図 b では、反力 R2 の真の方向が破線のベクトルで示されています)。
5. x 座標軸と y 座標軸の新しい位置を選択して、得られた結果の正確さを確認します (図 a)。 これらの軸に関して、平衡方程式を作成します。
式(1)と(2)を解くことによって得られる反応R 1 とR 2 の値は、式(3)と(4)から求められる値と大きさと方向が一致するため、問題は解決されました。正しく。
テストの問題と課題
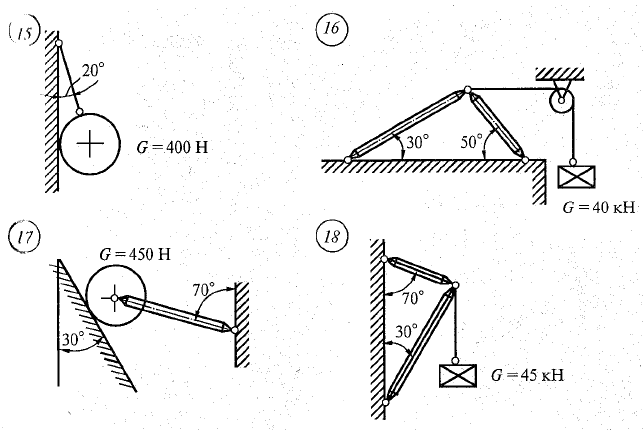
1. 与えられた力の系 (図 1.15) のどれがバランスがとれていますか?
3. 物体 1 と 2 (図 1.17) は平衡状態にあります。 物体が完全に固体である場合、既存の力のシステムを除去することは可能ですか? 身体が本物で変形可能であれば何が変わるでしょうか?
4. 担体内で考えられる反応の方向を示します (図 1.18)。
実務1
主題:分析的およびグラフ的な方法による結合反応の決定。
目標:接続の種類を研究し、その反応を判断する方法を学びます。
理論的な部分:
他の物体に付着せず、特定の位置から空間内で任意の運動を行うことができる物体を、 無料.
他の物体が固定されている、または接触していることによって空間内の動きが妨げられている物体を、と呼びます。 不自由な.
空間内で特定の物体の動きを制限するものはすべて呼び出されます。 コミュニケーション.
特定の接続が物体に作用して、その動きのいずれかを妨げる力は、 結合反力または コミュニケーションの反応.
コミュニケーションの反応は方向付けられる接続部が本体の動きを妨げる方向と反対の方向に動かします。
つながりの公理。結合を破棄し、それらの動作をこれらの結合の反応に置き換える場合、自由でない身体は自由であるとみなすことができます。
すべてのタイプの接続はいくつかのタイプに分類できます。
1. 接続 - スムーズなサポート (摩擦なし)。
図1.1
サポート反作用はサポート点で適用され、常にサポートに対して垂直に向けられます (図 1.1)。
2. 柔軟な接続 (糸、ロープ、ケーブル、チェーン)。
糸の反力は糸に沿って本体から離れる方向に向けられますが、糸は伸びることしかできません (図 1.2)。

図1.2
3. 硬いロッド。
反応の正確な方向は、心の中でロッドを取り外し、この接続がない状態で起こり得る体の動きを考慮することによって決定されます (図 1.3)。

図1.3
4. 明確なサポート。
ヒンジにより、取り付けポイントを中心に回転できます。 ヒンジは2種類あります。
可動ヒンジ。 可動ヒンジの反力は支持面に対して垂直に向けられます。 支持面を横切る移動のみは許可されません
(図1.4)。

図1.4
固定ヒンジ。このようなサポートの反力はヒンジ軸を通過しますが、その方向は不明です。 通常、これは水平方向と垂直方向の 2 つのコンポーネントの形式で表されます (図 1.5)。

図1.5
5. つまむ、または「密閉」。
接続点を移動することはできません。
反力は通常、座標軸に沿った 2 つの成分の形で表されます (図 1.6)。

図1.6
例。
荷物はロッドとロープに吊り下げられ、バランスが保たれています。 ロッド AB と CB の反応を決定します (図 1.7)。


図1.7
1. 分析方法。
1. 考えられる反応の方向を決定します。 心の中でロッド AB を取り外し、ロッド CB が下がると、点 B が壁から遠ざかります。ロッド AB の目的は、点 B を壁に向かって引っ張ることです。
CBロッドを外すとB点は下がりますので、CBロッドはB点を下から支え、反力は上向きになります。
2. ポイント B を接続から解放します。
3. 座標軸の方向を選択しましょう。Ox 軸は反応と一致します。
4. 点 B の平衡方程式を書き留めてみましょう。
5. 2 番目の方程式から次のことが得られます。
最初の方程式から次のことが得られます。
2.グラフィックメソッド。
1. 力のスケール係数を選択します: μ = 1 N/mm
力を表すセグメントを定義し、次のことを行います。
![]() ,
,
![]() .
.
2. 結果として生じる力の系は平衡状態にあるため、力は
多角形は閉じている必要があります (図 1.8)。

図1.8
3. 反応を計算し、グラフの結果として得られます。
誤差を計算します。
![]() .
.
エクササイズ。
接続の反応を分析的かつグラフ的に判断し、結果を比較します。







質問をコントロールします。
1. コミュニケーションとは何ですか?
2. サポートの主な種類を列挙します。
3. 接続の公理を書き留めます。
4. 柔軟な糸の反応はどのように指示されますか?
1. スケールに合わせた図
2. 解決策
3. 秘密の質問への回答
実践その2
主題: 2 つの支持ビームの支持体の反応の決定。
仕事の目標: 2 つの支柱に設置された梁の支柱の反応を判断する方法を学びます。
理論的な部分:
軸への力の投影は、ベクトルの始点と終点から軸に下ろした垂線で切り取られた軸のセグメントによって決まります (図 3.1)。

軸上の力の投影の大きさは、力の係数と力ベクトルとの間の角度の余弦の積に等しい。 正の方向軸。 したがって、投影には次の符号があります。 同じ方向に正力のベクトルと軸、 ネガティブ監督するとき マイナス軸に向かって(図3.2)。

F 1x = F 1 cos α 1 > 0;F 2x = F 2コス α2= - F2 cosβ 2 ;
cos α 2 = cos (180° - β 2)= - cos β2
F 3x= F 3 cos90° = 0; F 4x = F 4 cos180° = - F 4 。
互いに直交する 2 つの軸上に力を投影(図3.3)。

解析的手法による合力系の決定
合力の大きさは、力の系のベクトルのベクトル (幾何学的) 和に等しくなります。 結果を幾何学的に決定します。
座標系を選択し、これらの軸上の指定されたすべてのベクトルの比率を決定しましょう (図 3.4、a)。
軸上のすべてのベクトルの投影を合計します。 x と y(図3.4、 b)。
![]()




