집합 기계의 하우징 가공. 집계 기계
집계 기계
집합 기계는 운동학적으로 상호 연결되지 않은 표준 및 정규화된 장치로 만들어진 특수 기계입니다. 드릴링, 보링, 스레딩 및 밀링을 위한 대규모 및 대량 생산에 사용됩니다. 대부분의 경우 가공 중에 움직이지 않는 신체 부위와 샤프트를 처리합니다. 모듈형 공작 기계 설계에 정규화된 요소를 사용하면 설계 시간이 단축되고, 생산 공정이 용이해지며, 부품을 광범위하게 통합하고 제조 기술이 단순화될 수 있으며, 모듈형 공작 기계의 다양한 레이아웃을 만들 수도 있습니다. 최소한의 원본 요소를 사용합니다.
다중 위치 기계는 표면을 여러 패스로 처리해야 하는 부품을 위해 설계되었으며 이러한 표면은 서로 다른 평면에 있습니다. 이러한 모듈식 기계의 일반적인 레이아웃은 수직, 수평, 수직-수평일 수 있습니다. 이 기계에서는 부품이 회전식 인덱싱 테이블에 장착된 고정 장치의 여러 위치에서 한 면, 두 면, 세 면에서 순차적으로 처리됩니다. 덕분에 가공 중인 공작물의 로딩 및 언로딩, 클램핑 및 해제와 관련된 보조 시간이 가공 시간과 결합됩니다. 테이블 회전 시간은 정렬되지 않은 상태로 유지됩니다.
중앙 기둥이 있고 수평면에서 그 주변의 공작물 이동이 있는 집계 기계의 일반적인 레이아웃은 다음과 같습니다. 캐러셀형 테이블을 통해 공작물의 원형 이동이 보장됩니다. 파워 헤드는 처리 중인 공작물에 대해 다양한 각도에 위치합니다.
수직 평면에서 공작물의 원형 이동을 포함하는 모듈형 기계의 일반적인 레이아웃은 단면, 양면 및 삼면으로 구성됩니다. 회전하는 드럼에 클램핑 장치를 장착하고 1면, 2면, 3면에서 가공하는 드럼형 기계입니다.
공작물의 선형 이동이 가능한 집합 기계의 일반적인 레이아웃입니다. 이 유형의 기계의 특징은 파워 헤드에 대한 테이블의 직선 이동입니다.
모듈형 단일 목적 기계의 기본 요소
추가 장치 - 기계화 및 자동화와 같은 전력, 기계 제어를 제공합니다.
- 하부 구조 - 기계의 프레임과 작업 영역을 형성합니다.
- 포지셔닝 블록 - 공작물의 위치를 지정하고 이동할 수 있습니다.
- 작업 단위 - 도구의 위치 지정 및 이동을 수행합니다.
쌀. 1: 해당 위치 지정 블록이 있는 중앙 받침대 유형
포지셔닝 블록을 부착하기 위한 지지 부분을 형성하고 하부 구조의 다른 부분을 전체 기계 프레임에 연결하는 중앙 받침대는 높은 강성 요구 사항과 경량 칩 및 절삭유가 작업 공간에서 흘러나오는 요구 사항을 충족해야 합니다. 기계의 공간. 개별 작업 유닛을 보관하기 위한 지지 부품인 사이드 랙 및 랙입니다. 측면 스탠드는 개별 단일 목적 공작 기계 어셈블리를 수용할 수 있을 만큼 충분한 강성을 제공하도록 설계된 사출 성형 버전입니다. 작업 장치의 공간적 방향에 따라 한쪽 측면 스탠드를 다중 섹션 조립으로 구성할 수 있습니다.
쌀. 2: 사이드 스탠드 및 랙의 종류
중앙 받침대에 부착되어 있습니다. . 특정 유형의 포인팅 장치는 운송, 기계 작업 영역에 직접 부품 위치 지정 또는 작업 장치를 공작물에 공급하는 기능 블록입니다.집합 기계는 반자동 사이클로 작동하는 데 가장 자주 사용되며, 적재 및 하역 장치가 장착되는 경우는 드물며, 이 경우 기계는 자동 기계처럼 작동합니다. 집합 기계는 개별적으로 작동하거나 자동 라인의 일부가 될 수 있습니다. 6위치 회전 테이블을 갖춘 9스핀들 수평 모듈형 기계는 본체 부품의 드릴링, 카운터싱킹 및 나사 가공을 위해 설계되었습니다. 각 파워 헤드는 회전하여 하나의 도구에 공급됩니다. 두 개의 파워 헤드가 작업 위치에 설치됩니다. 공작물은 중앙 공압 분배기를 통해 압축 공기가 공급되는 공압 드라이브가 있는 장치에 고정됩니다. 총 12스핀들 드럼식 기계에는 분할 테이블 대신 회전 드럼이 있으며, 그 면에는 가공할 공작물이 있는 고정 장치가 배치됩니다. 일반적으로 이러한 기계에서는 대칭 평면을 갖는 부품의 구멍, 끝 및 외부 원통형 표면이 양쪽에서 동시에 가공됩니다. 가공된 공작물이 담긴 드럼은 두 개의 수직 랙에 배치됩니다. 파워 헤드에는 각각 6개의 도구가 들어 있는 스핀들 상자가 있습니다. 전동 드릴링, 밀링 및 기타 헤드는 원형 또는 직사각형 프레임의 가이드에 장착된 표준화된 브래킷에 설치됩니다. 프레임의 슬롯을 따라 헤드를 재배열하여 헤드 수와 상대적 위치를 변경하면 새로운 공작물 배치를 처리하기 위해 기계를 신속하게 재조정할 수 있습니다. 공작물은 범용 조립식 또는 범용 조정 장치의 원형 또는 직사각형 분할 테이블에 설치됩니다. 기계에는 제어 장치에 프로그램 제어 장치가 장착되어 있습니다.
정규화된 노드(베드, 파워 헤드 및 테이블, 스핀들 박스, 유압 구동 요소 등)은 기계의 레이아웃 조건, 치수, 가공 특성 등에 따라 디자인과 표준 크기 모두에 차이가 있습니다.
기계 위치 지정 장치에는 다음이 포함됩니다. 원형 회전 테이블, 원형 회전 테이블, 링 베어링이 있는 원형 회전 드럼, 중앙 베어링이 있는 중앙 회전 드럼, 직선 위치 지정 테이블, 위치 지정 및 고정 장치 및 스테퍼 컨베이어. 다음 기술 요구 사항은 이 그룹의 모든 장치에 적용됩니다.
가공 요구 사항을 충족하는 정적 및 동적 강성. 가공 요구 사항을 충족하는 작업 위치에서 공작물을 정밀하게 클램핑합니다. 유지 관리가 쉽습니다.
- 장치의 최소 측면 듀티 사이클.
- 칩과 절삭유의 자동 배출이 양호합니다.
- 작동 신뢰성 및 유지 관리 용이성.
특수 유닛(공작물의 구성, 치수 등에 따라 설계된 클램핑 고정 장치 및 도체)에는 고속 편심 클램프용 편심 및 핸들, 공압 실린더, 로드, 자동 클램핑용 공압 분배 장치 등 별도의 정규화된 요소도 있습니다. 공작물 압착, 공구 고정용 척, 도체 부싱.
최적의 설계는 다음과 같은 특성을 갖습니다. 위치결정 정도 위치결정 사이클 시간 클램프 및 공작물의 허용 중량 허용 외부 하중 클램프에 가압 오일을 공급하는 테이블 위치 섹션의 수. 회전 교차 테이블 - 여러 작업 위치에서 두 개의 수직 방향으로 부품을 처리할 수 있습니다.
회전 부분은 테이블 축의 중앙 기둥에 방사상으로 위치한 링 플레이트로 구성됩니다. 단점은 설치 및 수리가 어렵다는 점이며, 이로 인해 더 큰 크기의 원형 턴테이블로 교체되고 있습니다. 선형 위치 지정 테이블 - 개별 작업 위치 사이에서 공작물의 선형 왕복 운동을 하는 기계를 만드는 데 사용됩니다.
제어 메커니즘.집합 기계에서는 자동 제어 시스템을 사용하여 특정 순서로 수행되는 간단한 기술 주기를 재현합니다. 집합 기계의 제어 시스템을 사용하여 필요한 설치 및 작업 동작이 수행됩니다. 임시 및 트랙 제어 시스템이 있습니다.
처리가 완료되면 일반적으로 테이블은 로드 및 언로드 위치로 이동됩니다. 공작물을 운반하고 배치하는 것 외에도 작업 공급 또는 작업 부하 기능도 수행할 수 있습니다. 위치 정확도 작업 위치에서 강화 가능성. . 위치 지정 및 클램핑 장치 - 베이스 플레이트를 제 위치에 정확하게 정렬하고 단단히 고정하도록 설계되었습니다.
해당 개념은 일관성이 있어야 합니다. 작업 사이클 시간의 강성 고정 정도의 고정 시간은 칩과 절삭유의 저항을 최대한 짧게 해야 합니다. 스테퍼 컨베이어 - 다양한 작업 위치와 교환 위치 사이에서 공작물 플레이트를 직접 운반하는 역할을 합니다.
임시 제어 시스템에는 일반적으로 기계식 드라이브가 있으며 트랙 시스템은 유압 드라이브, 공압 유압식, 전기식, 전기 유압식 및 덜 자주 기계식으로 작동합니다. 제어 시스템의 신호에 따라 센서 배럴이 작업 위치에 설치되고 기술 사이클을 시작하라는 명령이 파워 헤드로 전송됩니다.
최소 이송시간 정확한 이송 칩 제거 양호. 이는 별도의 스핀들과 피드 드라이브를 갖고 있으며 주로 자동 사이클로 작동하는 기능 장치입니다. 드릴링, 조각, 레벨링, 밀링과 같은 간단한 작업을 수행할 수 있습니다.
대부분의 작업 장치의 구조 설계를 통해 모든 위치(예: 수평, 수직, 위에서 아래로, 아래에서 위로, 경사)에서 작업할 수 있으며 많은 작업 장치는 모든 경사 위치에서 작업할 수 있습니다. 모든 강성, 스핀들 크기 및 전력 요구 사항을 충족하면서 가능한 한 작은 공간을 수용할 수 있도록 최대한 작게 설계되었습니다.
모든 헤드가 사이클을 완료하면 원래 위치로 돌아가고 분할 테이블에 위치 변경 명령이 내려집니다.
그림에서. 114는 이름을 딴 공장에서 제조된 다중 위치 모듈형 기계의 다이어그램을 보여줍니다. Likhacheva. 기계에는 기계, 공압 및 전기 제어 시스템이 있습니다. 고려 중인 기계 작동 사이클을 통해 기계 제어 시스템의 작동을 추적할 수 있습니다.
작업 단위의 구조는 광범위하고 다양합니다. 모듈형 단일 목적 기계의 경우 작업 단위는 생산성, 정확성 및 가공 품질, 경제적 수익성 측면에서 특정 공정 작업에 대한 최적의 옵션 선택을 제공해야 합니다.
하나의 스핀들과 여러 개의 스핀들 헤드가 있는 기어, 서랍 장치, 드라이브 스핀들 구동 장치. 특정 유형의 작업, 특히 드릴링 및 태핑을 위한 접이식 스핀들이 장착되어 있습니다. 디자인에 따라 크게 3가지 기능으로 구분됩니다.
작업자는 고정 장치 1에 공작물을 설치하고 시작 밸브(그림에 표시되지 않음)를 사용하여 L자형 레버 2를 사용하여 공작물을 고정하라는 명령을 보냅니다. 다음으로 작업자가 "시작" 버튼을 켜고 명령이 전송됩니다. 전기 제어 시스템에서 2-솔레노이드 전기 공압식 밸브(14)로 연결되며, 이 밸브는 압축 공기를 네트워크에서 실린더(10)의 왼쪽 공동으로 전달합니다. 실린더의 피스톤 로드(11)는 웨지 클램프(18)(보기 A 참조)를 제거합니다. 프리즘(19)을 작동시키고 리미트 스위치(13)를 누르면 전기 공압 밸브(17)에 전기 명령이 전달됩니다. 밸브는 테이블을 회전시키기 위해 공압 명령을 실린더(12) 액츄에이터에 전달합니다.
액츄에이터의 피스톤(16)을 움직이는 압축 공기는 웨지(20)를 오른쪽으로 이동시켜 테이블을 스탠드에 눌렀던 로드(21)를 풀어줍니다. 이 경우, 리미트 스위치(15)가 작동되어 전기 모터(도면에는 표시되지 않음)에 의해 구동되는 테이블 회전 메커니즘을 켜라는 명령을 내립니다. 전기 모터가 켜지면 웜 휠(22)과 동일한 샤프트(25)에 앉아 있는 몰타 메커니즘의 드라이버(26)의 롤러(27)가 몰타 크로스(28)의 홈에 들어가 테이블(3)을 주어진 각도로 회전시킵니다. 롤러가 십자형 홈을 떠난 후 레버 23은 리미트 스위치 24에 작용하여 전기 공압 밸브 14를 전환하여 압축 공기를 실린더 10의 오른쪽 공동으로 보냅니다. 이 실린더의 피스톤 로드는 다음과 연결됩니다. 테이블 자물쇠. 테이블이 고정되면 리미트 스위치(13)가 해제되어 테이블 회전 기구의 전기 모터를 끄라는 명령이 내려진다. 동시에 전기 공압식 밸브(17)가 전환되어 압축 공기를 실린더(12)의 오른쪽 공동으로 보냅니다. 웨지(20)는 기계의 테이블(3)을 스탠드로 누릅니다.
쐐기가 왼쪽으로 이동하면 리미트 스위치 15가 해제되어 전기 모터 9 및 5, 파워 헤드 8 및 6을 켜라는 명령이 제공됩니다. 공작물을 처리한 후 도구가 있는 퀼 4 및 7이 원래 위치에 있고 파워 헤드의 전기 모터가 꺼집니다. 전기 회로는 다음 사이클 동안 무료입니다.
자동 사이클로 작동하도록 기계를 설정할 때 마지막 헤드의 전기 모터를 끈 후 전기 공압 밸브(14)가 켜지고 사이클이 재개됩니다.
제어 시스템을 설정할 때 메커니즘의 명확성과 빠른 작동에 특별한 주의를 기울일 필요가 있습니다. 이러한 요소는 네트워크와 기계 자체 라인(보통 4-8 atm)의 정상적인 압력 유지에 따라 달라집니다. 시운전 도면에 따른 정지 장치 및 전기 접촉기의 올바른 설치 및 기타 여러 가지 이유 때문입니다.
집합 기계가 안정적으로 작동하려면 작동 중에 제어 메커니즘을 양호한 상태로 유지해야 합니다. 공압 라인에서 공기가 누출되는 것은 허용되지 않습니다. 이는 제어 메커니즘뿐만 아니라 액추에이터에도 영향을 미치기 때문입니다(예: 부품이 클램핑 장치에 제대로 고정되지 않음). 공압 시스템의 공기에는 습기가 없어야 합니다. 이렇게 하려면 하루에 한 번씩 공기통(필터)에서 물을 배출해야 합니다.
기계 고장의 원인은 공압 스위치의 솔레노이드와 전기 스위치에 냉각수와 미세 먼지가 유입되는 것일 수 있습니다. 이를 방지하려면 메커니즘을 밀봉해야 합니다.
그 성능은 기계 제어 시스템의 올바른 작동에 따라 달라집니다.
기계식 피드 드라이브가 있는 파워 헤드.파워 헤드는 모듈형 기계 및 자동 라인의 주요 구성 요소입니다.
기계식 피드 드라이브가 장착된 파워 헤드는 주로 드릴링, 나사 가공 및 보링 작업용으로 설계되었으며 구조가 충분히 견고한 경우 밀링 작업용으로 설계되었습니다. 밀링을 위해 파워 헤드에는 특수 부착 장치가 장착되어 있습니다.
파워 헤드는 테이블 평면에 평행, 수직 또는 비스듬하게 조립 기계의 프레임 또는 랙에 장착됩니다.
그림에서. 그림 115는 플랫 캠 파워 헤드의 운동학적 다이어그램을 보여줍니다. 하우징(2)에 장착된 전기 모터(1)에서 V 벨트 변속기를 통해 중공형 웜(7)으로 회전이 전달된 다음 가동 스플라인 연결을 통해 두 개의 앵귤러 콘택트 볼 베어링(20)과 퀼 11에 설치된 슬리브 36. 오른쪽 끝에 공구가 작동 중일 때 스핀들이 설치됩니다. 스핀들(8)의 작업 피드는 축을 따라 헤드 하우징의 구멍 내에서 이동할 수 있지만 축을 중심으로 회전할 수 없는 퀼(11)을 통해 수행됩니다.
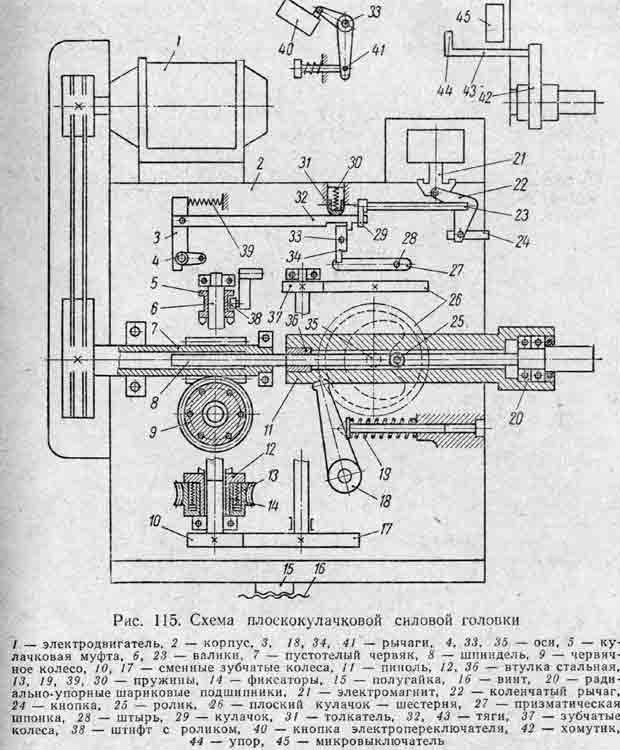
캠과 퀼 롤러의 지속적인 접촉은 스프링 19에 의해 보장되며, 그 작용은 레버 18에 의해 퀼에 전달됩니다.
부싱(12)의 이동식 랜딩에는 웜휠(9)이 있는데, 이 웜휠(9)은 스프링(13)에 의해 부싱에 눌려 부싱의 원추형 접시형 홈에 맞는 볼이 있는 6개의 클램프(14)를 통해 작동합니다. 이 연결 설계는 피드 메커니즘을 과부하로부터 보호합니다. 허용 이송이 증가하면 스프링(13)의 힘을 극복하는 클램프(14)가 슬리브(12)의 구멍에서 나오고 공구 이송이 중지되고 웜 휠이 움직임을 전달하지 않고 고정 슬리브(12) 주위로 회전하기 시작합니다.
여러 헤드의 동기 작동을 위해 헤드의 각 작동 주기(이중 퀼 스트로크) 후에 퀼 피드를 켜는 특수 트리거 메커니즘이 있습니다.
퀼이 역방향으로 이동하는 동안 키(27)는 헤드 본체(2)에 설치된 롤러(33)에 장착된 이중 암 레버(34)의 하단에 작용합니다. 레버(34)를 돌리면 상단이 로드(32)를 운반하고 스프링(39)의 힘을 극복하여 관련 레버(3)를 축(4) 주위로 회전시킵니다. 레버(3)의 하단에는 롤러가 있는 핀이 장착되어 있습니다. 캠 클러치 5의 원형 홈에 맞는 38. 레버를 돌리면 클러치 캠이 부싱 12의 캠과 분리되어 피드가 중지됩니다.
헤드 작동주기를 반복하려면 버튼 24를 누르거나 전자석 21의 자동 공급을 켜십시오. 두 경우 모두 캠 29가 부착 된 상태에서 크랭크 레버 22를 통해 롤러 23으로 움직임이 전달됩니다. 캠은 스프링(30)의 힘을 극복하고 로드(32)의 푸셔(31)를 통해 작용하여 레버(34)에서 분리됩니다. 이 경우 스프링(59)의 작용에 따라 피드 클러치(5)를 포함하여 레버(5)가 회전합니다. 클러치 5는 피드 메커니즘과 퀼을 켜고 앞으로 이동하여 레버 34가 축 55를 중심으로 회전하도록 허용합니다. 스프링 39의 작용에 따라 로드 32는 원래 위치로 돌아갑니다. 레버 34가 홈에 들어갑니다.
헤드 메커니즘의 마찰 표면은 윤활 처리되어 있습니다. 윤활 시스템은 부싱 12와 통합된 편심의 움직임을 받는 플런저 펌프에서 작동합니다.
여러 헤드의 조인트 작동을 차단하기 위해 롤러(23)에 장착된 크랭크 레버(41)가 사용됩니다. 퀼이 돌아올 때 키(27)의 작용에 따라 레버(34)가 회전하고 이와 함께 레버(41)가 회전하여 전기 잠금 회로의 접점을 닫는 전기 스위치(40)의 버튼.
파워 헤드는 슬라이드에 장착되어 나사 16과 하프 너트 15를 사용하여 가이드가 스핀들 축과 평행하게 이동할 수 있습니다.
헤드가 실 절단용인 경우 클램프(42)가 퀼에 설치되어 함께 움직이며 스톱(44)이 있는 로드(43)를 통해 마이크로 스위치(45)의 핀을 누릅니다. 전기 모터(1)의 회전이 반전된다.
헤드 조정 시 로드(43)의 스톱(44)은 마이크로스위치 버튼(45)으로부터 일정 깊이의 실을 절단하는데 필요한 거리에 설정된다.
헤드의 작동 주기는 플랫 캠(26)의 프로파일과 회전 속도라는 두 가지 요소에 의해 결정됩니다. 헤드의 총 스트로크 길이, 급속 접근 길이, 후퇴 및 작업 피드 섹션은 캠의 설계에 따라 달라집니다. . 퀼의 움직임을 보다 균일하게 만들기 위해 작업 피드 섹션의 캠 프로파일은 아르키메데스 나선을 따라 만들어집니다. 퀼의 가속 접근 및 후퇴 속도와 공구의 이송 속도는 캠의 회전 속도에 따라 달라집니다. 파워 헤드의 이송 속도를 변경하려면 해당 기어 10 및 17 또는 캠 26(특정 프로파일 포함)을 선택하고 설치하십시오. 긴 길이의 가속 접근이 필요한 경우(최대 200mm) 파워 헤드가 드라이브 슬라이드에 설치됩니다.
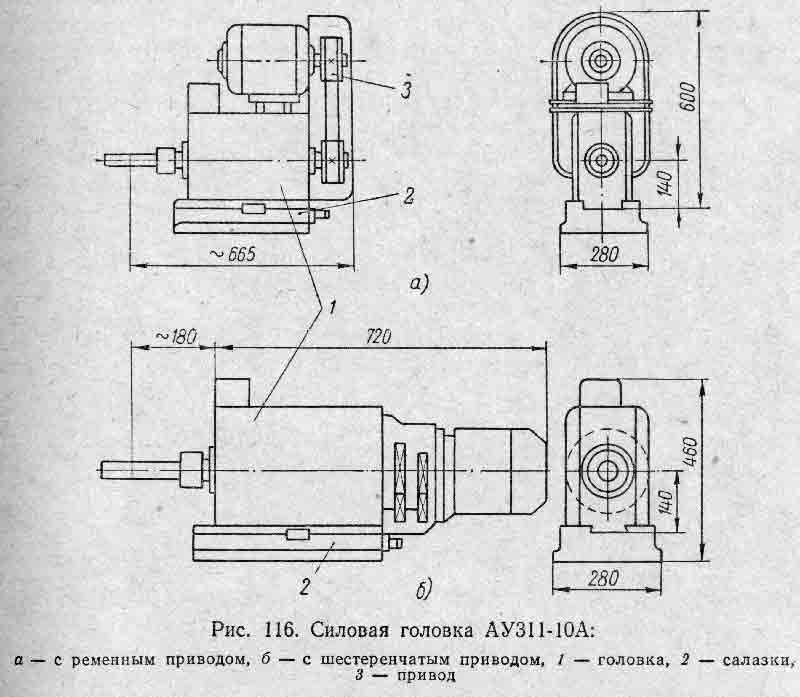
파워 헤드에는 벨트 드라이브(그림 116, a) 또는 기어박스 드라이브(그림 116, b)(단일 쌍(모델 AU311-62) 및 이중 쌍(모델 LUZ11-60))이 있을 수 있습니다.