石油とガスに関する大百科事典。 サポートします。 サポート構造とそのシンボル
Dystlab Education プロジェクトで私が指導している「建築構造の計算 - ゼロから!」コースの生徒は、定期的に「ヒンジ」や「ヒンジ サポート」などの概念について説明してほしいと私に求めます。 どうやら、構造の動作の観点からこれらの重要な要素を理解することは、初心者の設計者にとっていくつかの困難を引き起こすようです。
さまざまな辞書や Wiki では、ヒンジを「回転運動学的ペア」と定義しています。この用語は、建築構造よりも機械工学 (機械や機構の要素) を指す用語ですが、ヒンジの原理はどこでも同じです。 ヒンジ - 1 つの点または軸を中心に回転できるように 2 つの要素を接続するデバイス。
ヒンジを使用するためのさまざまなスキームが次のビデオで説明されています。 最初のビデオでは、窓とドア システムにヒンジが使用されています。2 番目のビデオでは、カメラ ジャイロの安定化にヒンジが使用されています (1 つではなく、複数のヒンジが使用されています)。
ビデオ 1. ヒンジの例
ビデオ 2. 複雑な機構の一部としてのヒンジ
これらのビデオから、コンセプト自体が明確になるはずです。ヒンジは、要素を厳密に固定する必要はないが、回転できるようにする必要がある場合に必要です。
建築構造物のヒンジ
建物や構造物では、原則として、ヒンジは最も重要なノードであるサポートに使用されます。 場合によっては、構造の「内部」部分にヒンジが導入されることがあります。

橋の径間構造の支承部

一時的なサポートへのロープの固定も関節で表現されています

部品としてのヒンジ 耐荷重構造民間の建物の中で

「三ヒンジアーチ」方式で実装された歩道橋(珍しいデザイン!)

アトラクション「観覧車」の関節サポート
設計スキームにおけるヒンジ
いずれにせよ、構造物の設計は、その設計スキームの開発から始まります。 最も単純な計算スキームの例をいくつか考えてみましょう。

図 1. ヒンジ付きサポートを備えた設計スキームの例
驚かれるかどうかはわかりませんが、3 つの図はすべて同じタイプの構造サポート、つまりヒンジ付きを示しています。 各図の左側のサポートは、ある角度だけ「回転」していることに注意してください。 これは、実際の構造ではなく、仮想の対応物である簡略化されたモデル (計算スキーム) を使用していることを強調するためだけに行われました。 そして、 計算スキーム構造物の動作に根本的に影響を与える機能のみに注目することが重要です。この場合、これらは構造物を地面に取り付ける 2 本の支持ロッドです。
以下は、1905 年の高架プロジェクトの説明ノートから抜粋した設計スキームの別の例です。
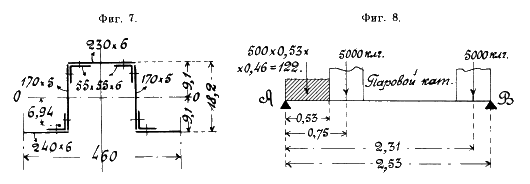
図 2. 多関節ビーム、プロジェクト 1905
右側 (図 8、図 2) には 2 つのサポート上の単純なビームが示されており、黒い三角形は関節と関節を示しています。 固定サポート(どれがどれなのかを見つけるのは難しいですが、これはプロジェクトの作成者であるエンジニアの E.O.Paton と P.Ya.Kamentsev に対する質問です)。 ご覧のとおり、表記内の唯一の正しいバリアントは、 明確なサポートいいえ、この要素を図上でどのように表示するかはあなた次第です。
サークルは何を意味しますか
簡単にわかるように、図ではヒンジは小さな円を象徴しています。 構造の支持セクションは、この中心を中心に回転します。

図 3. 構造セクション A、B はヒンジ付きサポートの周りで曲げて回転します
動きと反応
ヒンジにより、セクションがその中心を中心に回転できます。 この時点では角運動が許可されているため、対応する基準モーメントはありません。 これは、建築構造におけるヒンジの主な目的です。曲げの過程で発生するモーメントをゼロにすることです。

図 4. ハードピンチ (1) と 明確なサポート(2) 梁
可動サポートと固定サポートの違いは何ですか?
おそらく、図 1、3、4 では、梁が異なるサポート上にあることに気づいたでしょう。左側では、サポートが 3 つの円で描かれています。 あ mi と 2 つの接続線、および右側 - 2 つの円 あミと一行。 何故ですか?
各接続線 (サポートの画像内の短いセグメント) は、このノードの地面への取り付けをモデル化しているため、この方向へのビームの直線運動は禁止されています。 したがって、ビームは支持部分で曲がることができません。 構造の始めと終わりの両方で、垂直または傾斜したロッドが引かれて梁を支えます。 傾斜した構造は常に相互に直交する軸 (垂直軸と水平軸) に投影できるため、図 1 のスキーム 2 は他のスキームと基本的に異なるものではないことを思い出してください。
単一の水平サポート バーの目的を理解することも重要です。 これは、ビームの水平方向 (長手軸方向) の移動を禁止しますが、ビームが設置されているセクションのみを禁止します。 これは古典的なヒンジ付き固定サポートです。

図 5. ヒンジ付きサポートによって許可される動きと禁止される動き
図 5 では、右側のサポートは、ビームの右端が水平方向に移動できるため、関節式と呼ばれます。 これは、温度変動などによる構造の伸びや縮みを考慮する上で重要な状況です。
結論
ヒンジは 重要な要素デザイン: 取り付けられたセクションがヒンジ軸の周りを回転できるようにします。 ヒンジは基準モーメントをリセットします。
設計図では、ヒンジは原則として円で示されています。 ヒンジ付き可動サポートとヒンジ付き固定サポートは、ビーム システムの最も一般的なタイプのサポートの 1 つです。 どちらもヒンジを備えており、基準セクションの回転が可能であり、関節式サポートによりビームの対応する端の水平方向の移動も可能になります。
サポートは「地面に」取り付けられていると言われるのが通例ですが、これを文字通りに受け取るべきではありません。 多くの場合、「地面」は、より剛性の高い別の構造要素です。
図上。 1.21 は、点 A と B にあるヒンジ付きの可動および固定サポートに基づく水平ビームを示しています。
反応 R旋回可能に移動可能な支持体のAは、支持面に対して垂直にビームに向かって向けられている。 関節式可動サポートはローラー上に配置されており、ビームが支持面に沿って移動するのを妨げません。 ローラーの摩擦を考慮しない場合、反応の作用線は次のようになります。 R A はヒンジの中心を座面に対して垂直に通過します。
ヒンジで固定されたサポートは、座標軸に沿ったビームの並進運動を防ぎますが、ヒンジ軸を中心に回転することは可能にします。 反応アクションライン Rヒンジ付きサポートの B はヒンジの中心を通過しますが、弾性率と反力の方向は事前にはわかりません。
図上。 1.22 はビーム AB を示しています。 逆の解釈を可能にする力の平行四辺形の公理によれば、反作用は R B は、座標軸に平行な成分に分解できます。
と

より複雑なタイプの接続とその反応については、後で概念を紹介するときに検討します。 力のペアと 点と軸の周りの力のモーメント.
接続の公理 - 結合を破棄し、それらの作用をこれらの結合の反応に置き換える場合、自由でない物体は自由であるとみなすことができます。
図上。 1.23 は、外部制約が課される非自由機械システムとみなされるビーム AB を示しています。
点 B のヒンジ付き固定支持体により、ビームは座標軸に平行に並進移動できず、図の平面内で回転できます。 これを踏まえての反応は、 R B をそのコンポーネントに分解する Yの、 Z B、座標軸に平行。
点 A にあるヒンジ付き可動サポートにより、ビームが支持面に移動することはできません。 Rそして法線に沿って指示されます。

の

ビーム AB はアクティブな力の作用により平衡状態にあります F 1 ,F 2と反応 Z b、 Y b、 R対外関係。 反応 R A を座標軸に沿った力の成分に分解することをお勧めします。
力の成分への分解は、力が加えられた時点でのみ実行されることをもう一度強調しなければなりません。
自制のための質問と課題
「不自由な身体」 .
用語の定義を立てる 「つながり」 .
用語の定義を立てる 「結合反応」 .
用語の定義を立てる 「スムーズな接続」 .
用語の定義を立てる 「フレキシブル接続」 .
用語の定義を立てる 「無重力ロッド」 .
用語の定義を立てる 「フリーボディ」 .
定式化する 接続の公理 .
将来、この問題の計算スキームに基づいて、次のことを理解できるようになります。 物体 (または物体システム) の概略図。問題ではその平衡が考慮され、物体に作用する与えられた (アクティブな) 力と、物体に課される結合の反力、問題の軸を解決するために導入された座標系、幾何学的な寸法と角度に関するすべての必要なデータ(問題を解決するために既知または決定する必要がある)。
有能で明確な計算スキームが最初であり、常に重要です 必要な条件あらゆる問題をうまく解決できます。それは力学だけではありません。
設計スキームを作成するときは、非常に慎重かつ正確である必要があります。タスクの条件や図面を検討するとき、与えられた力や結合の反力を設計スキームに適用するときなどに注意を払い、...正確に行う必要があります。デザインスキームを設計するとき。
解決策のこの段階で、問題に対する設計スキームを迅速に作成するには、次のことを完全に理解する必要があります。 慣例結合の種類とその結合の反応 (つまり、ポスター 4c), 分散された荷重を集中した力に置き換えることができ、あらゆる物体の重心の位置を決定することができます。
タスクに与えられる力には次のようなものがあります。 集中した小言ルツキ,タスクの図面には力ベクトルの形式で示されます。 構造要素の重量。 分散荷重一定の強度で。 身体や身体システムの問題であっても、 力のカップル。それらは通常、モーメントの大きさと回転方向によって与えられます。 集中荷重の適用点は、問題の条件に常に示されます。 重力の作用点は、原則として示されません。 問題を解く人は誰でも、問題の体の重心にこの力を加えると考えられています。
分散負荷についてさらに詳しく検討する必要があります。 一定の面積に分布する荷重と、一定の長さに分布する荷重があります。 前者には、建物の壁にかかる風圧の力、建物の床スラブにかかる雪の荷重、タンクやダムなどの壁にかかる液体の圧力が含まれます。この荷重は、単位で測定される強度 (p) によって特徴付けられます。圧力の単位 - つまり N/m 2 で表します。 単位面積あたりの荷重が均一である場合、この荷重に代わる合力の大きさは、荷重の強度と荷重下の表面積の積によって決まります。
静力学の問題では、通常、荷重は特定の長さにわたって分散されると考えられます。 この場合、荷重に代わる合力の値は、荷重が作用するセクションの長さと荷重分布の性質によって異なります。 このような荷重は強度によっても特徴付けられますが、単位長さあたりのニュートン、つまりN / mで測定されます。 原則として、記号qで表されます。 さまざまな目的の梁や構造物は、長さに沿って分散される荷重の作用を計算されます。
力学におけるビームの長さに沿った荷重の強さの変化と材料の抵抗をグラフで表現したものを、一般に次のように呼びます。 負荷分散図。 検討したケースでは、荷重分布図に従って、荷重に代わる集中力の大きさと力の作用線の位置が簡単な規則に従って決定されます。
力の値は、荷重を示すプレートの面積に等しくなります。
力の作用線は図の領域の重心を通過します。
計算スキームは、与えられた力に加えて、物体 (物体システム) に課される結合の反力を示します。
リンクについては、第 1 章で簡単に説明しました。ここでは、リンクの種類とその反応について詳しく説明する必要があります。 まずポスター 4c を見てみましょう。静的問題の解決方法を学びたい人は、「Excellent」というマークを覚えておいてくださいと著者が提案しています。 そして、少なくともその後大学で4年間勉強します。 
1. 滑らかな表面- 摩擦力を無視できる反作用を決定する場合の表面。 滑らかな表面の反応ベクトルは、物体の表面との接触点に適用され、表面の法線に沿って方向付けられます。 指定されたサーフェスに接する平面に垂直です。
検討中の接続タイプのバリエーションとしては、出っ張りや点で身体を支持する方法があります。 ポイントサポート。 この場合、物体自体の表面は滑らかであると考えられます。反応ベクトルは、物体の表面の法線に沿って方向付けられます。

2. 粗い(滑らかではない)表面- 問題の状態によっては、摩擦力が無視できない表面。 この場合の表面粗さは、問題の条件で具体的に指定されます。
粗い表面の反応は、この反応が 2 つの力、つまり表面の通常の反応と物体間の接触面での摩擦力の組み合わせとして表されるという点で、滑らかな表面の反応とは異なります。 摩擦力は、表面上の物体の可能な動きとは反対の方向に向けられます。
価値 f (摩擦係数) は問題で指定されるか、または希望の値です。 上式による摩擦力は、摩擦力が最大値に達した場合にのみ決定されるため、, 体の摩擦の問題で
考慮 リミットバランスの位置にあります!
 3.
無重力ロッド端に理想的なヒンジを備えたもの - ロッドの形をした直線または曲線の本体の形で、他の本体への取り付け点にヒンジがあり、重りを備えた理想的な接続。重量は無視できます。検討中の問題を解決するとき。
3.
無重力ロッド端に理想的なヒンジを備えたもの - ロッドの形をした直線または曲線の本体の形で、他の本体への取り付け点にヒンジがあり、重りを備えた理想的な接続。重量は無視できます。検討中の問題を解決するとき。
ロッドを他の物体に接続する理想的なヒンジには摩擦がないと仮定されます。
ロッドは圧縮または伸張することができます。 ロッドが伸びると、まっすぐなロッドが本体に作用する力は、ロッドが取り付けられている本体からロッドに沿って方向付けられます。 ロッドが圧縮されると、その反力が取り付け点に向けられます。
ロッド内の応力の性質は通常不明です。 したがって、ロッドが伸びることを考慮して、ロッドの反応ベクトルを取り付け点から本体に向けるのが通例です。 バーにかかる力を計算するときに、その値が正であることが判明した場合、バーは実際に伸びています。
計算中にロッドにかかる力が負であることが判明した場合、ロッドは圧縮されています。
(-) - 圧縮、(+) - 伸張の記号を使用して応力の性質を判断するのが便利で簡単です。
応力の性質を指定する際のこの規則は、以下でも使用されます。
「材料の強度」という分野の問題を解決するとき。
問題によっては、曲線状の無重力ロッドが存在します。 このようなロッドの反応は、ヒンジ軸を結ぶ線に沿って方向付けられます。 これは平衡状態から得られます ソリッドボディヒンジに加えられる 2 つの力のシステムの作用下で。
4. 柔軟な糸- 接続。ケーブル、ロープ、ロープ、チェーンなど、他にも多くの名前があります。

糸は、接続と同様に、引き伸ばされたときにのみ機能します。 スレッドを破棄する場合 フィラメント反応ベクトル平衡が考慮されている本体に糸が結び付けられている点に取り付けられているのが示されています。糸に沿って案内されます。
理想的なブロックの上に投げた糸で最後にある程度の重みを付けて体を保持することがよくあります。 摩擦なしで軸を中心に回転できるブロックが理想的であると考えられるため、本体への取り付け点での糸の張力は、糸の端での荷重の重量に等しいと考えられます。
新しい指定を導入しないように、この場合の糸張力は糸端の負荷の重量と同じ記号で表すことをお勧めします。
5. 多関節サポート- サポートに接続されている体の点が、どの表面に沿っても摩擦なしで移動できるようにするサポート。 可動支持体の反力は、支持体が移動できる表面の法線に沿って方向付けられます。

特定の設計の実装では、可動サポートは、本体取り付け点の 2 つの相互に反対の方向への動きを防ぐことができます。 したがって、ロッドの場合と同様に、サポートの反力の大きさを決定した結果は、正の場合も負の場合もあり得ます。
6. ヒンジ付き固定サポートまた 円筒ジョイント- そのようなサポートに固定された本体の点がヒンジの回転軸に垂直な平面内で移動することを許可しないが、他の接続がない場合、本体がこの軸の周りを回転できるようにする接続。 従来、ヒンジには摩擦がないと考えられていました。
従来「ヒンジ固定支持体」と呼ばれる支持体の設計(これらは滑り軸受、転がり軸受、および単にピンジョイントの場合もあります)は、異なる場合があります。
サポートの反力は、サポートの固定部分の側面から、このサポートに接続され平衡位置にあると考えられる本体に作用する力の結果です。
ヒンジ付きサポートの反力ヒンジの回転軸に垂直な平面内に位置する。 ヒンジの中心を通過します。 大きさも方向も不明。
この力は、問題を解く際に、座標軸上の投影を見つけることによって決定されます。

 この問題の図では、これらの投影は、適切な指定が付いたベクトル (力の成分または成分) として描かれています。
この問題の図では、これらの投影は、適切な指定が付いたベクトル (力の成分または成分) として描かれています。
タスクの図面では、問題の接続にさまざまなタイプの記号が使用できることに注意する必要があります。 PSS 上のタスクおよび SSS 上のタスクにおけるヒンジ固定サポートの主なタイプのシンボルが図とポスターに示されています。
7. ボールジョイントまたは球面ジョイント- 物体の点の 1 つがどの方向にも移動することを許可しないが、この点を通過する座標軸のいずれかに対して一定の制限内で物体を回転させることを許可する接続。 
このようなサポートの概略設計、その記号、および反応を図に示します。
サポート反力は、空間内での大きさと方向が未知の力です。 座標軸に沿ったそのコンポーネントは、目的の値です。
タスクおよび設計スキームの図面内の球状ヒンジの条件付きイメージは、PSS 上のタスクの円筒状ヒンジの条件付きイメージと同じです。 これは誤解を招くべきではありません。 球面ヒンジは PPSS の問題でのみ検出され、円筒ヒンジの条件表現が異なります。
8. スラスト軸受- 接続。円筒形のヒンジと基準面の組み合わせです。 PPSS 上のタスクで発生します。 このような接続を有する本体の別の支持体は、通常、円筒形のヒンジである。
スラストベアリングの反力は、球面ヒンジの場合と同様、大きさと方向が不明であり、3 つの座標軸に沿った方向の成分によって決まります。
図はスラスト軸受の従来イメージとその設計オプションの一つを示しています。
9. 挟み込みサポートとも呼ばれている 強制終了- 埋め込まれたボディが任意の方向に移動したり、任意の座標軸の周りを回転したりするのを防ぐ接続の条件名。 挟み込みサポートの例としては、家の壁に埋め込まれた窓枠やバルコニーのスラブ、パイプやラジエーターを固定するためのブラケット、壁に打ち込まれた通常の釘などが挙げられます。
剛性の取り付けに加えて、固定本体が取り付け点に対して回転せず、一方の方向にのみ移動することを許可しない接続であるスライド取り付けも行われる可能性があることに注意してください。 このようなコミュニケーションの変形の反応は、図の変形 b) に示されています。
ポスター 4c に示されているものと同様の表の形式で、接続の種類とその反応を自分で覚えておくことをお勧めします。 ただし、問題に対する計算スキーム上の特定の接続の反力の方向を決定することに疑問がある場合は、次のルールを知っておくと、これらの反力を正しく方向付けるのに役立ちます。
1. 一方向のみを考慮した場合、コミュニケーションが身体の点を妨げる場合、コミュニケーションの反応の力はこの方向に向けられます。
2. 接続が 2 つの相互に直交する方向を考慮している場合、接続の反応は 2 つの未知の力、つまりこの接続の完全な反応の構成要素となります。 座標軸上で。
後与えられた集中力、力のペアの瞬間のタスクに対する図面上の画像。 アクションを置き換えた後 分散荷重作用中のそれらと同等の力が集中し、その反作用の力による結合の作用 タスクの図面はタスクの計算スキームに変わります。 この図面とダイアグラムは問題の解決に役立つこともありますが、図面を不注意に扱うと単にエラーを引き起こす可能性もあります。
図面が問題解決に役立つようにするには、次のことを知っておく必要があります。
1. 解決すべき問題の図面 (計算スキーム) を作成する時間を決して節約すべきではありません。 図面が明確であればあるほど、問題をより早く解決でき、エラーの可能性が低くなります。
2. タスクの図面上で計算スキームを直接実行することをお勧めします (ポスター 12c を参照)。 タスクの図面は、指定されたすべての寸法が読みやすく、図面の力のベクトルまたは線と座標軸によって形成される角度が明確に見えるように、十分な大きさにする必要があります。
3. すべての力のベクトル、力のペアのモーメントの矢印が、図面の背景に対してはっきりと目立つことが非常に重要です。 「不適切に」選択されたベクトルは、平衡方程式を作成するときに見落とされやすくなります。 これには、問題に対する間違った解決策と、エラーを探すための時間のロスの両方が伴います。 鉛筆で絵を描き、インクでベクトルを描く方が良いでしょう。
4. 図面内の寸法の視覚的な比例関係が、問題文で指定されたものと一致していることが重要です。
さらに重要なのは角です力を形成したり、特定の座標軸で線を引いたり、与えられたものに対応しました。
30 0 、45 0 、60 0 および 90 0 の角度は、手で正確に描く方法を学ぶのに望ましいです。
多くの初心者デザイナーにとって、主な問題はデザイン スキームの選択です。どこにヒンジを配置するか、どこに剛体ノードを配置するかです。 何がより収益性を高めるのか、また特定の設計ノードで一般的に何が必要なのかを理解するにはどうすればよいでしょうか? これは非常に幅広い質問ですが、この記事がそのような多面的な問題に光を当てることができれば幸いです。
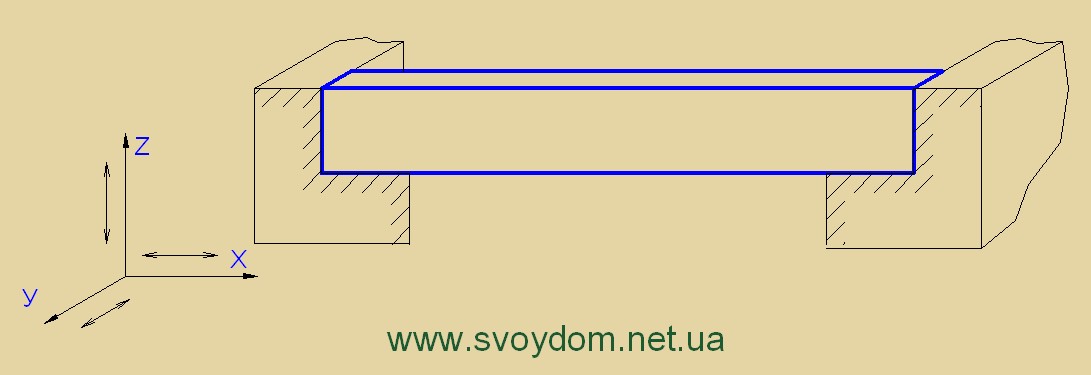
サポート ノードとは何か、および図におけるこれらのノードの指定
本質から始めましょう。 各構造物は支えられなければなりません - 少なくとも、あるはずの高さから落ちてはなりません。 しかし、さらに深く掘り下げると、要素の信頼性の高い動作のためには、要素の落下を禁止するだけでは十分ではありません。
要素はどのようにして空間内を移動できるのでしょうか? まず、垂直 (Z 軸)、水平 (X 軸および Y 軸) の 3 つの平面のいずれかに沿って移動できます。 次に、同じ 3 つの軸を中心としたノード内の要素の回転を行うことができます。
したがって、可能な動きは 6 つあります (プラス方向またはマイナス方向も考慮すると、6 つではなく 12 つあります)。これらは自由度とも呼ばれます。これは非常に説明的なものです。名前。 構造物が空中にぶら下がっている場合 (非現実的な状況)、それは完全に自由であり、何にも制限されません。 サポートがその下のある場所に表示され、垂直方向の移動が妨げられる場合、サポートの場所での要素の自由度の 1 つが Z 軸に沿って制限されます。このような制限の例としては、要素の自由サポートが挙げられます。滑らかで滑りやすい表面上の金属ビーム - サポートがあるため落下することはありませんが、ある程度の努力で X 軸と Y 軸に沿って移動したり、任意の軸の周りを回転したりすることができます。 今後を見据えて、重要な点を明確にしましょう。 ノード内の要素に回転制約がない場合、ノードは連結されます。。 したがって、1 つの軸のみに沿った制限があるこのような単純なヒンジは、通常次のように表されます。

このような指定を解読するのは簡単です。円はヒンジの存在 (つまり、この時点で要素の回転が禁止されていないこと) を意味し、杖は一方向への移動の禁止 (通常はすぐに回転が禁止されることを意味します) を意味します。図から明らかですが、どのようなものであるかはわかりませんが、この場合は垂直方向の禁止です)。 ハッチングされた水平線はサポートの存在を表します。
自由度を制限するための次のオプションは、2 軸方向の動きの禁止です。 同じ金属ビームの場合、これらは Z 軸と X 軸となり、力が加えられると Y 軸に沿って移動できます。 ご覧のとおり、そのターンも何にも制限されていません。
ターンの制限がないことをどのように想像できますか? この梁をそれ自身の軸を中心に回転させようとすると(たとえば、天井を片側だけで傾けます。そうすると、梁は天井の重みで回転し始めます)、このねじれを妨げるものは何もなく、梁はそれに沿って伸びます。ねじり力の作用により、その全長が倒れ始めます。 同様に、ビームの中心に垂直荷重がかかると、ビームは曲がり、支点で Y 軸を中心に自由に回転します (左は時計回り、右は反時計回り)。 これがヒンジとして理解されるものです。
|
ネタバレ:「サポートノードの設計における重要なニュアンス」 |
|
理想的なヒンジの構築では、ピンチやピンチが発生しないことをすぐに予約したいと思います。 必ず何らかの条件があります。 摩擦力を無視し、Y 軸に沿ったビームの動きが何にも制限されないと仮定しましょう。 通常、経験を積むと、結び目がしっかりしているか、ヒンジで固定されているかを確認できるようになります。 不完全な挟み込み(小さな努力では構造が回転せず、作用力が増加するとサポートが耐えられなくなり、回転が発生する場合)を回避する方法を学ぶことも非常に重要です。 このような状況は、構造の予測不可能な動作を引き起こします。これは、ある設計スキームに対して考慮されたものですが、別の設計スキームに従って作業する必要があります。 フレーム内に剛性の梁サポートがあり、梁を柱に溶接することによって提供されるとします。 しかし、溶接接合部の計算が正しくなく、加えられた力に耐えられずに継ぎ目が崩れてしまいます。 梁は柱の上に残り続けますが、すでにサポートをオンにすることができます。 この場合、曲げモーメントの図は劇的に変化します。サポートでは、モーメントはゼロになる傾向がありますが、スパン モーメントは増加します。 そして、ビームはつまむように設計されており、増加した瞬間を認識する準備ができていませんでした。 こうして破壊が起こるのです。 したがって、剛体ノードは常に可能な最大荷重を考慮して設計する必要があります。 |
このようなヒンジは次のように指定されます。
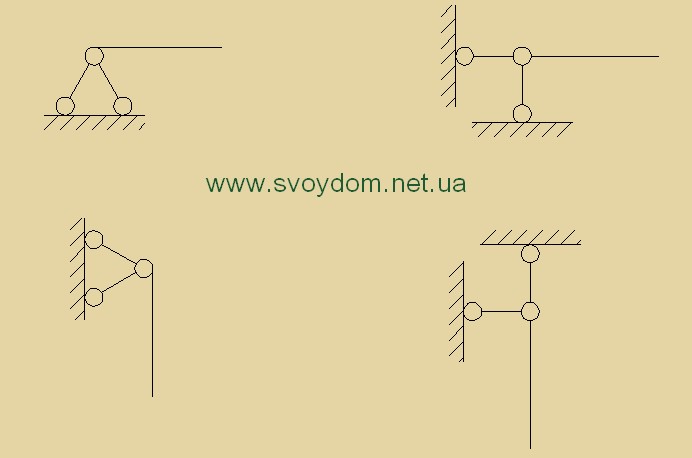
左右の表記は同等です。 右側は、より視覚的です。 1 - ノード内の水平ロッドは、垂直方向 (端に円がある垂直スティック) と水平方向 (端に円がある水平スティック) の移動が制限されます。 2 - 垂直ロッドもノード内で垂直方向と水平方向の移動が制限されます。 左側もまったく同じヒンジの非常に一般的な指定で、スティックが三角形の形に配置されているだけですが、それらが2つあるという事実は、動きが2つの軸に沿って制限されていることを意味します。要素とその軸に垂直です。 特に怠惰な同志は円をまったく描かず、そのようなヒンジを単に三角形として指定する可能性があります - これも起こります。
ここで、ヒンジ付きビームの古典的な名称が何を意味するかを考えてみましょう。
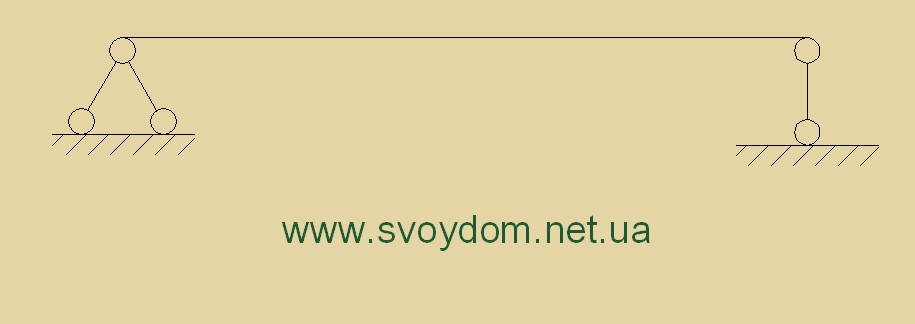
これは2つのサポートを持つビームであり、左側では水平方向の動きも制限されています(これが当てはまらない場合、システムは安定しません-材料の強度にはそのような条件があります-ロッドには次のような条件が必要です) 3 つの移動制限。この場合、Z に関する 2 つの制限と 1 つの X)。 設計者は、梁のサポートが設計スキームに準拠していることを確認する方法を考慮する必要があります。これを決して忘れてはなりません。
平面問題の最後のケースは、2 つの変位と回転という 3 つの自由度の制限です。 上では、どの要素にも 6 (または 12) の自由度があると述べましたが、これは 3 次元モデルの場合です。 通常、計算では平面問題を考慮します。 そしてここで回転の制限に行き着きます - これは古典的な概念です ハードノードまた つまむ- 支持点にあるとき、要素は移動も回転もできません。 このようなノードの例は、チーム終了ノードとして機能できます。 鉄筋コンクリート柱ガラスの中に入る - それは非常に深く一枚岩であるため、移動したり向きを変えたりする機会がありません。
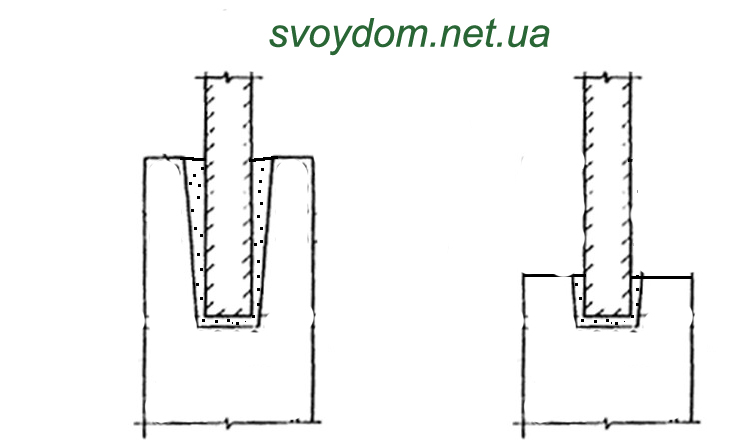
このような柱の埋め込み深さは厳密に計算されていますが、左図の柱がガラスの中で回転することは、見た目からも想像できません。 しかし、右側の列は簡単で、明らかなヒンジであり、このようにピンチを設計することは受け入れられません。 あちこちではありますが、柱はガラスに浸されており、溝はコンクリートで埋められています。
さらに多くのピンチ オプションについては、この記事の中で説明します。 次に、ピンチの表記を扱います。 古典的なもので、蝶番と違って特に種類はありません。

左側はサポートにクランプされた水平要素、右側は垂直要素です。
そして最後に、フレーム内の多関節ノードと剛体ノードについてです。 梁と柱の接続ノードが剛体の場合、シンボルがまったく表示されないか、隅に塗りつぶされた三角形が表示されます (上の 2 つの図のように)。 梁が枢動可能に柱に載っている場合、梁の端に円が描かれます (下の図のように)。

ヒンジ付きノットまたはリジッドノットを設計する方法
支持板、梁、まぐさ。
ノードを設計するときに最初に覚えておくべきことは、多くの場合、ヒンジとピンチはサポートの深さによって区別されるということです。
スラブ、まぐさ、または梁がセクションの高さ以下の深さで支持されており、追加の対策 (回転を防ぐ埋め込み要素への溶接など) が講じられていない場合、これは常にきれいなヒンジです。 。 ために 金属梁 250 mm で関節動作すると考えられます。
サポートが要素のセクションの高さの 2 倍、つまり 2.5 倍を超える場合、そのようなサポートは挟み込みと見なすことができます。 しかし、ここにはニュアンスがあります。
まず、要素には上から (石材などで) 荷重をかける必要があり、この重りの重さは、サポート上の要素の力を吸収するのに十分でなければなりません。
第二に、埋め込まれた部品に溶接することによって要素の回転が制限される場合、別の解決策が可能です。 そしてここでは、剛体ノードの設計の特徴を明確に理解する必要があります。 梁の下部が溶接されている場合 (これは金属構造物とプレキャスト コンクリートの両方でよく見られます。梁またはスラブの抵当権がサポートの抵当権に溶接されています)、これはサポートのオンを妨げるものではありません。 - これについては上で述べたように、要素の水平方向の動きを防ぐだけです。 ただし、梁の上部がサポート上の溶接によってしっかりと固定されている場合(これらは、金属製のフレームノード、またはプレハブクロスバーの補強材の上部出口のバス溶接、または剛フレームノード内の埋め込み要素の溶接のいずれかです)バルコニー スラブのサポート ノード。コンソールなのでつまむ必要があります)、これはすでにハード ノードです。 サポート上の回転を明らかに防ぎます。
以下の図では、ヒンジ付きアセンブリと剛性アセンブリが標準シリーズ (シリーズ 2.440-1、2.140-1 issue 1、2.130-1 issue 9) から選択されています。 これらは、ヒンジ付きジョイントでは締結が梁またはスラブの下部に行われ、剛性ジョイントでは上部に行われることを明確に示しています。 明確化: スラブ サポート ノードでは、アンカーは剛体ノードを提供するものではなく、床の水平方向の変位を防ぐだけの柔軟な要素です。

しかし、結び目を正しくデザインできれば、戦いは半分終わります。 また、ノードのすべての要素が要素から伝達される最大の力に耐えられるかどうかを計算する必要があります。 ここでは、埋め込み部品と溶接の両方を計算し、石積みからの重量が設計に考慮されているかどうかをチェックする必要があります。
柱と基礎の接続。
金属柱を支える場合、ボルトの数と柱の根元の設計が決め手になります。 ここではメタルについては詳しく説明しません。 これは私のプロフィールではありません。 柱を取り付ける基礎のボルトが2本だけであれば、これは100%ヒンジであることだけを書きます。 また、支柱がプレートを介して基礎埋設部に溶接されている場合は、これも蝶番となります。 残りのケースは文献で詳しく説明されており、典型的なシリーズにはノードがあります - 一般に、多くの情報があるため、ここで混乱することは困難です。
代表チーム向け 鉄筋コンクリート柱基礎ガラスへのそれらの強固な埋め込みが使用されます (これについては上で説明しました)。 「建物や構造物の柱の自然基礎上の基礎の設計マニュアル」を開くと、この剛体ノードのすべての要素の計算とその設計の原則を見つけることができます。
ヒンジ付きジョイントを使用すると、柱 (柱) は追加の措置を講じずに単に基礎の上に置かれるか、浅いガラスに埋め込まれます。
モノリシック構造の接続。
の モノリシック構造堅固な結び目またはヒンジは、常に適切に固定された補強材の存在によって定義されます。
支持体上でスラブまたは梁の補強材が固定または重なりの量だけ支持体の構造に挿入されていない場合、そのようなノードはヒンジで固定されていると見なされます。
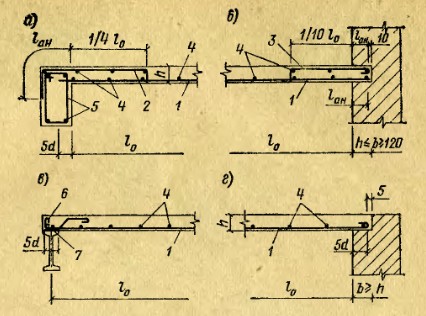
以下の図はサポート オプションを示しています モノリシックスラブ鉄筋コンクリート造設計ガイドより。 図 (a) と (b) - これはスラブとサポートの強固な接続です。最初のケースでは、スラブの上部補強材が固定の長さにわたって梁に挿入されます。 2 番目のケースでは、作業鉄筋の固定量によってもスラブが壁に挟まれます。 図 (c) と (d) - これは梁と壁上のスラブのヒンジ付きサポートです。ここでは、補強材がサポートに許容される最小のサポート深さまで運ばれています。
鉄筋コンクリートのモノリシッククロスバーと柱を接続するフレームノードは、梁上のスラブの支持よりもさらに深刻に見えます。 ここで、クロスバーの上部補強材は、アンカー長さ 1 と 2 の値だけ柱に挿入されます(ロッドの半分が 1 つの長さに挿入され、半分が 2 つの長さに挿入されます)。

ノード内の場合 鉄筋コンクリートフレーム梁と柱の両方の補強材がアンカーの長さを通過し、それよりも長く伸びている場合 (たとえば、ある種の中間ノード)、そのようなノードは剛体であるとみなされます。
柱を基礎にしっかりと接続するには、基礎から十分な長さの出口を作成する必要があり (少なくともオーバーラップ量、詳細については設計ガイドを参照)、同じ出口を基礎に挿入する必要があります。基礎を定着部の長さまで延長します。
同様に パイルグリル- 杭からの突起の長さが定着部の長さより短い場合、グリルと杭の間の接続は強固であるとは見なされません。 ヒンジ接続の場合、出口の長さは 150 ~ 200 mm のままですが、これはもはや望ましくありません。 これはヒンジと剛体ジョイントの間の境界状態になります。結局のところ、計算は純粋なヒンジに対して行われました。
固定の長さに対して補強材を配置するスペースがない場合は、ワッシャー、プレートの溶接などの追加の対策が講じられます。 ただし、そのような要素は必ず穴を開けるように設計する必要があります (埋め込み部品のアンカーの計算のようなもの。鉄筋コンクリート設計ガイドに記載されています)。
ヒンジとピンチのトピックについても読むことができます。
ページ1
枢動可能な支持体 (図 118 の支持体 B) により、回転に加えて、ビームの端を基準面と平行に移動させることができます。 これに応じて、このようなサポートの反力がヒンジの中心を通過します。
第1のタイプは、円筒形の可動式または枢動式に可動な支持体である。 システムに取り付けられた上部バランサー、下部バランサー、バランサーの間に配置された円筒形のヒンジ、および基準面に沿って移動できるローラーで構成されます。 このような支持により、ヒンジを中心としたシステムの回転と支持面に沿った並進運動が可能になります。
枢動可能な支持体を通過するビームの断面は、基準面に対して平行に変位および回転することができるが、基準面に対して垂直に変位することはできない。 サポート内では、サポート面に垂直な力 R の形で 1 つの反応のみが発生します。 このようなサポートでビームを固定すると、ビームに 1 つの接続が課されます。
枢動可能な支持体を通過するビームの断面は、基準面に対して平行に変位および回転することができるが、基準面に対して垂直に変位することはできない。 支持体では、支持面に垂直な力 R の形で 1 つの反応のみが発生します。 このようなサポートでビームを固定すると、ビームに 1 つの接続が課されます。
梁を計算する場合、主に 3 つのタイプのサポート (梁の端を固定する 3 つのタイプ) があります。 枢軸的に固定されたサポート。 ビームの端のしっかりとした終端。
主なパラメトリック共振が 0 2Q で発生するという事実は簡単に説明できます。ビーム軸の任意の点が振動の 1 サイクルを完了するのにかかる時間内に、旋回可能に移動可能なサポートと一致するセクションの中心は 2 サイクルの振動を実行します。ロッドの軸に沿った振動。
架空のビームのこのセクションにある実際のビームの右自由端は、終端に対応します。 枢動可能な支持体の上のセクションでは、実際のビームの偏向はゼロに等しく、傾斜角はゼロとは異なります。 したがって、架空の梁のこのセクションにヒンジを導入する必要があります。このセクションでは、架空の曲げモーメント M は常にゼロに等しく、架空の横力 Q はゼロとは異なります。
枢動可能なサポート (図 7.6) により、ビームは水平方向に移動し、ビームはサポートに対して特定の角度で回転できます (図 7.6 を参照)。 これによれば、Rで示される枢動可能な支持体では垂直方向の反応のみが生じる。このような支持体でビームを固定すると、ビームに1つの接続が課される。
ギアボックスのシャフトと車軸の設計スキームは、ヒンジ付きサポート上の階段状または滑らかなビームの形で表されます。 アキシアル荷重とラジアル荷重を同時に感知するベアリングは枢動的に固定されたベアリングに置き換えられ、ラジアル力のみを感知するベアリングは枢動的に移動可能なベアリングに置き換えられます。 ヒンジ付きサポートの位置は、転がり軸受の軸の接触角を考慮して決定されます (c. ラジアル軸受が 0 の場合、サポートの位置は軸受幅の中央に位置します。衛星の軸は、荷重ベクトルに対して回転しないことは、静的にみなされると考えることができます。 定義できないビーム弾性シール付き。
| 確実な気密性により着地部の応力集中を軽減。 シャフトのスプライン部分の有理形式。 |
ギアボックスのシャフトと車軸の設計スキームは、ヒンジ付きサポート上の階段状または滑らかなビームの形で表されます。 アキシアル荷重とラジアル荷重を同時に感知するベアリングは枢動的に固定されたベアリングに置き換えられ、ラジアル力のみを感知するベアリングは枢動的に移動可能なベアリングに置き換えられます。 ヒンジ付きサポートの位置は、転がり軸受の軸の接触角を考慮して決定されます (c. ラジアル ベアリングの場合は 0 で、サポートの位置は軸受幅の中央に位置します。衛星の軸は、荷重ベクトルに対して回転しないビームは、弾性シールを備えた静的に不定なビームとみなすことができます。
ここで、中間ヒンジを備えた実際の梁の断面を考えてみましょう。 このセクションでは、たわみと傾斜角はゼロではありません。 さらに、ヒンジによってビームの湾曲した軸が途切れることができるため、ヒンジの左右の接線の傾斜角度が異なる必要があります。 指定された条件を満たすには、架空の梁のこのセクションに枢動可能なサポートを導入する必要があります。 その場合、サポート上の仮想の曲げモーメント M はゼロとは異なります。したがって、実際のビームのこのセクションのたわみもゼロとは異なります。
ページ数:  ̄  ̄ ̄ ̄1