ヒンジ付き固定サポートの例。 対応デバイスの図式化
ヒンジ付きの可動サポートの概略図を図 1 に示します。 3.2b.
可動サポートにより、ビームは温度変化に応じて自由に長さを変更できるため、熱応力の可能性が排除されます。
2.静止 ピボットサポート(図3.2、c)。 このようなサポートにより、ビームの端の回転が可能になりますが、どの方向への並進運動も排除されます。 その中で発生する反応は、水平と垂直の2つのコンポーネントに分解できます。
3. 堅固なシーリングまたは挟み込み (図 3.2、d)。 そのような固定は、基準部分の直線的または角度的な変位を許容しない。 この支持では、一般に反力が発生する可能性があり、通常は 2 つの成分 (垂直方向と水平方向) と挟み込みモーメント (反力モーメント) に分解されます。
67. 直接曲げにおける座屈の計算はどのように行われますか?
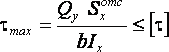
法線応力の強度条件
どこで - 断面における最大モジュラス応力; - 曲げモーメント; 抵抗の軸モーメントです。 – 許容法線応力。
せん断応力の強度条件
 ,
,
断面の最大モジュラス応力はどこにありますか。 - 許容せん断応力。
梁の材料に対して引張りと圧縮の異なる許容法線応力が指定されている場合、強度条件は梁の最も伸びた繊維と最も圧縮された繊維に別々に適用されます。
71. 軸系・穴系とは
私たちの業界の公差とはめあいの基準は、使用できるはめあいの 2 つのセット、つまり穴システムとシャフト システムを確立しています。
ホールシステムは、ホールの最大偏差が同じ(同じ精度クラスと同じ公称サイズ)のランディングのセットであり、シャフトの最大偏差を変更することで異なるランディングが実現されます(図73、 a)。 穴システムのすべてのはめあいでは、穴の下限偏差は常にゼロです。

この穴をメインホールと呼びます。 図からわかるように、公称サイズ (直径) が同じでメイン穴の公差が一定の場合、シャフトの限界寸法を変更することで異なるはめあいが得られます。 実際、限界直径が最大のシャフト1でさえ、最小の穴に自由に入る。 シャフト 2 をその最大限界サイズで最小の穴に接続することにより、ゼロに等しいギャップが得られますが、この組み合わせの穴とシャフトの直径の他の比率では、可動嵌合が得られます。 ボール3と4の着陸は、穴とシャフト3と4の実際の寸法のいくつかの値ではギャップがあり、他の値では干渉があるため、移行のグループに属します。 シャフト 5 は、すべての条件下で締まりばめで穴に入り、常に固定されたはめあいを保証します。
対応するはめあいの文字で示される、合致に含まれる 2 番目の (非メイン) パーツの指定とは対照的に、穴システムのメイン穴は文字 A で省略されます。
シャフトシステムは、シャフトの最大偏差が同じ(同じ精度クラスと同じ公称サイズを持つ)ランディングのセットです。 a穴の限界偏差を変えることで様々な着地を実現。 シャフトシステムのすべての着陸では、シャフトの上限偏差は常にゼロです。 このような軸を主軸と呼びます。
シャフト システムの概略図を図 1 に示します。 図 73、b から、公称サイズ (直径) が同じでメイン シャフトの公差が一定の場合、穴の限界寸法を変更することによって異なるはめあいが得られることがわかります。 実際、穴1をこのシャフトと接続することで、あらゆる状況下で可動フィットが得られます。 穴 2 をこのシャフトとペアリングすると、同様のフィット感が得られますが、ゼロに等しいギャップを得る可能性があります. 穴 3 と 4 とのシャフト接続は、移行ランディングのグループに属し、穴 5 と - 固定に属しますフィット。
シャフト系のメインシャフトをBと略します。
図219.1. ビームサポートオプションに対する曲げモーメントとたわみの値の依存性。
図 219.1.a は、ヒンジで支えられた梁を示しています。 このような梁の場合、最大曲げモーメント M したがって、最大垂直応力はスパンの中央に位置する断面に作用しますが、サポートのモーメントは 0 に等しくなります。図 1.b は、同じスパンと同じ荷重を持つ梁を示しています。図 219.1.a のビームと同様にビームに適用されます。 この場合、図 219.1.b に示すビームの場合、最大曲げモーメントはサポートにあるセクションに作用し、その値はヒンジ付きサポートのビームの 1.5 分の 1 になり、最大たわみは へ 5倍小さくなります。
ご覧のとおり、違いは顕著です。 そして、 鉄筋コンクリート構造物鉄筋コンクリートは人造石のようなコンクリートが圧縮応力に作用する複雑な材料であり、金属補強材は通常引張領域に設置されているため、引張領域と圧縮領域の決定は特に重要です。ロッドの柔軟性を考慮し、それによって金属の最大強度特性を使用します。 したがって、サポートの種類を正しく決定することで、かなりの量の材料を節約できます。 さらに、まぐさや床スラブなどの梁には、支持を目的とした特定のセクションがあるため、そのような梁は、2 つのヒンジ付きサポートを備えた 2 つのカンチレバー ビームと見なすことができます。支持セクションはビーム コンソールですが、そのようなセクションのサイズが比較的小さい場合、あまり意味がありません。
構造がどのような種類のサポートを持っているかわからない場合は、関節式カンチレバーを使用してください。 この場合に起こりうる最悪の事態は、1.5 ~ 2 倍の安全マージンです。
構造の製造を少し節約したい人は、記事を最後まで読む必要があります。 さて、ここで主なことについて: 構造力学と材料の強度で使用されるヒンジ付きサポートやサポートの剛性ピンチなどの概念と、それをどのように扱うか?
ほとんどの場合、建物構造の計算は単純化された概算であるため、計算をできるだけ迅速かつ簡単に実行できます。 たとえば、建設に使用されるモルタルに配置される圧延プロファイルからジャンパーを計算する必要があります れんが壁. できるだけ正確に計算を実行するには、リンテルに作用する荷重に加えて、スパンの長さだけでなく、支持部品、強度を考慮して、リンテルの全長も知る必要があります。石積みモルタルとレンガの圧縮強度、レンガの幾何学的形状、金属とモルタルの接着力、および金属とモルタルの間の摩擦力、石積みモルタルの欠陥の可能性、圧延プロファイル、プロファイルの真直度、支持プラットフォームの高さの違いなど。 ただし、構造力学は、まぐさと考えると 関節サポートコンソールなしでは、次の公差と設計上の仮定を使用すると、計算を最小限に単純化できます。
1. 隔壁は、等方性特性を備えた均質な物体と見なされます。 すべての方向で同一の物理的および機械的特性。 これにより、ジャンパーを軸上にある完全に平らな直線ロッドと見なすことができます バツ . 軸 バツ 棒断面の重心を通過します。 軸に沿って適用される荷重 で 、つまり 車軸にぶつかる バツ 断面の重心を通過します。
2.ロッドは完全に平らであるため、ジャンパーの支持セクションは2つの基準点に減ります とと で、軸に沿って支持セクションに作用する内部応力 で この場合は支持反応である集中荷重に還元されます。 ビームの支持プラットフォームと支持セクションが点に縮小されるため、集中的な支持反力が支持点に適用されます。 したがって、計算では、ジャンパーの全長ではなく、ビームのスパンが使用されます l - 基準点間の距離。
3. 作用力は反力と等しくなります。たとえば、ジャンパーに作用する総荷重は支持反力の合計に等しくなります。
4. 溶液への金属の付着力とビームが軸に沿って移動するときに発生する摩擦力 バツ 、基準点でこの軸に沿ったビームの不動性を確保するのに十分です と基準点として考慮されません で. つまり、その時点で と軸に沿って移動するビーム バツ できませんが、その時点で で自由にできます。
5.ジャンパーは負荷の作用で曲がるので、設計図では、地面とジャンパーの間の距離を何らかの形で示す必要があります。
次の設計スキームは、これらの設計仮定を最も完全に満たしています。
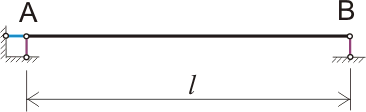
図219.2. 連結された非片持ちビーム。
この設計スキームの本質は次のとおりです。ジャンパーは、ビームの自由なたわみと変位を確保するのに十分な、無限に高い強度、剛性、および長さを持つ3つの条件付きサポートロッドにピボット式に接続されたロッドです。ポイントでのビームの でたわみ中の直線寸法の変化により、軸に沿ってのみ発生します バツ . ヒンジの摩擦力は 0 で、支持棒も地面にヒンジで固定されています。 この場合、図 2 で紫色で示されている垂直ロッドは、軸に平行です。 で であり、図 2 で青色でマークされている水平ロッドは軸上にあります。 バツ メインビームのように。 支持棒のこの位置は、幾何学的に不変の設計を提供します。 これにより、サポートロッドを3つのサポートリアクションに置き換えることができ、3つの基本的な平衡方程式で管理するための計算では、ここでは計算を実行しないため、平衡方程式は与えられません(に基づいて決定されたモーメントの値平衡方程式については、図 219.1.a) に示されています。 原則として、このような設計スキームでは、ジャンパーの計算に30分もかからず、ほとんどの時間が負荷の収集に費やされます。 ヒンジ付きサポートは、特に片持ち梁の場合、別の方法で表すことができます。たとえば、図 219.1.a) に示すように、サポートの 1 つを条件付きでスライドするように指定できますが、ヒンジ付きサポートがどのように描かれても、物理的な意味はの設計スキームの ヒンジ付き 2 つのサポートは変更されません。
この 計算スキームたとえば、木製、金属製、および鉄筋コンクリート製の床梁を計算する場合など、2 つのサポートを持ち、同時に比較的小さなサポート領域を持つほとんどの建築構造に使用できます ( 鉄筋コンクリート梁は、床スラブとは別に製造されます)、床板および 2 つの壁で支えられた鉄筋コンクリートの床スラブ、まぐさ用。 この場合、構造物の操作に対する釘、ネジ、またはモルタルの影響は無視できます。 だが
ベアリングの長さがまぐさのスパンの長さの 1/3 より大きい場合、または重い材料の壁を持つ建物の床スラブのスパンの長さの 1/8 より大きい場合、その構造が考慮できるかどうかを確認することは理にかなっています。サポートに挟まれたように。
構造力学の観点から、図 219.1.b) に示されているように、サポートの剛性ピンチは、次のようにサポート ロッドに置き換えることができます。
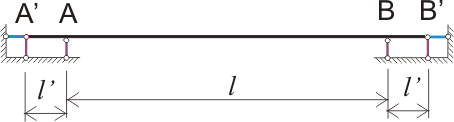
図219.3。ピンチサポートをスイベルサポートに交換
ピンチが硬直していると見なされるには、値 私」 大幅に少なくする必要があります l またはロッドオンプロット あぁ」と BB」これらの条件のいずれかを条件として、完全に固定する必要があります。ポイントでのビーム断面の回転角度 とと では 0 になるか、または 0 になる傾向があります。実際には、最初の条件は、ビームがサポートに溶接されている場合にのみ実現可能です ( 金属フレーム)または溶接およびコンクリート( 鉄筋コンクリートフレーム)、目ではなく計算による。 または、ビームの支持部分に上下から負荷をかけます 私」 たとえば、十分な挟み込みがある場合、ビームの負荷よりも大幅に大きくなります。 鉄筋コンクリートスラブ壁のレンガの間の天井。 しかし、これでも十分ではありません。 このようなビームは、2 つのサポート (図 1.b) に固定されているか、または 6 つのサポート ロッド (図 3) があり、3 回静的に不確定なビームであり、すべての結果が生じます。 この場合、すでに述べたように、計算は行わず、その必要もありません。主な計算式は図 1.b に示されていますが、得られた知識は既に使用できます。
しっかりとクランプされたサポートとヒンジ付きサポートの主な違いは、どこにどのように負荷がかかるかに関係なく、しっかりとクランプされたサポート上のビーム (ロッド) の断面の回転角度が常に 0 に等しいことです。 、およびヒンジ付きサポートでは、断面の傾斜角は通常最大です。 これにより、最終的にたわみ値にこのような明確な違いが生じます。
支持部の長さの影響例
1. 次に、現実に最も近いケースを考えてみましょう
レンガの壁の開口部の上のまぐさには、一定の長さの支持セクションがあり、まぐさに均等に適用されます 分布荷重、言い換えれば、レンガがまぐさの上に置かれています。 このようなジャンパーは、条件付きで、負荷が均一に分散された 2 つのヒンジ付きサポート上の 2 つのカンチレバー ビームと見なすことができます。 サポートの曲げモーメントがスパンの最大モーメントと等しくなるように、コンソールの長さを選択する必要があります。 処方の複雑さにもかかわらず、タスクは非常に単純です。 2 つのヒンジ付きサポートの非カンチレバー ビームの場合、最大曲げモーメントは次のようになります。 q l 2 /8 、同じスパンの片持ち梁の場合 l そのような長さを選択する必要があります 私」 条件が スパンの M max = サポートの M = ql 2 /16. なぜそうなのか、ここでは説明しません。私の言葉を信じてください(ただし、学生の要求に応じて、対称的にロードされたコンソールを使用した傾斜梁の計算の機能について別の記事を書きました)。 したがって、分散荷重からのサポートのモーメントは q l 2/16 = q l" 2 /2 . したがって、ジャンパーの支持部分の長さは
私」 = l /(√8 ) ≈ 0.3535l
たとえば、長さ 2 メートルのスパンに敷設されたまぐさの場合、まぐさを計算できるように、1 つの支持セクションの長さは少なくとも 0.7 m、支持セクションの全長は少なくとも 1.4 m でなければなりません。 2 つのヒンジ付きサポートの 2 つのカンチレバー ビームとして。 そして、2メートルのスパンを超えるジャンパーの場合、そのようなサポートセクションの長さが長い場合、1メートルの開口部を超えるジャンパーの場合、36 cmのサポートセクションの長さは、最小で 25 cm が必要なため、このようなサイズのジャンパーを選択できる場合があり、材料をほぼ 2 倍節約できます。 計算時に考慮しなければならない機能がいくつかあります。
- 支持セクションの長さの増加は、サポートのモーメントの増加につながり、ビームはサポートにしっかりと固定された状態で近づきます。
- 支持セクションの長さを短くすると、スパンのモーメントが増加し、梁が非片持ち梁に近づきます。
- 私たちが一様に分布していると認める荷重は、実際にはそうではありません。さらに、体積荷重が平面に縮小されると、そのような荷重の適用面は、重心を通る面と常に一致するとは限りません。セクションの。
これらの機能は、1.2 または 1.3 などの補正係数によって考慮することができます。 モーメント値に補正係数 1.5 を掛けると、これはすでにしっかりと固定されたビームになります。
2. 別の例
床スラブは、幅 77 cm のレンガの壁 (これは、壁がさらに断熱されていない場合、現代の建築基準法で必要な断熱を提供するためにしばしば必要とされる壁の厚さです)、スラブのスパン l 私」 = 0.6 m. 床スラブの分布荷重 1 q2= 4000kg/m。
そのようなスラブが、支持体にしっかりと固定された梁と見なされるか、またはヒンジ付き支持体の片持ち梁と見なされるかを確認する必要があります。
ノート: 梁の支持セクションの長さが梁の断面の高さよりも小さい場合、応力の再分布による壁の重量による負荷は考慮されず、梁は次のように見なされます。ヒンジ付きサポートの非カンチレバー。 この場合、梁の高さ 時間 が 10 ~ 20 cm の範囲にある場合、ビームの支持セクションの長さはセクションの高さよりもはるかに大きいため、壁の重量による負荷を考慮する必要があります。支持セクションの長さは壁の厚さに匹敵するため、壁の全幅を考慮する必要があります。 サポート上の瞬間は
Mは\u003d 4000 0.6 2 / 2 \u003d 720 kg mをサポートし、
Mスパン\u003d 500 4 2 / 8 \u003d 1000 kg m、
したがって、床スラブのスパンの最大モーメントは 280 kg m であり、これは 1000/3 = 333 kg m 未満であるため、そのような床スラブはサポートにしっかりと固定されていると見なす必要があります。
ノート: この場合でも、梁と壁材の剛性が無限大ではないため、支持セクションの開始点での断面の回転角度はゼロにはなりません。 これは、より正確な計算を行うには、固定された梁のスパンを、梁が置かれている壁間の実際の距離よりも大きくする必要があることを意味します。 さらに、 計算値特に梁の弾性率が壁材料の弾性率よりも大幅に大きい場合、スパンは梁自体の長さよりも長くなる可能性があります。
3. 別の例
床スラブは幅 51 cm のレンガの壁 (これはまだよく行われている壁の厚さです) の上にあり、スラブのスパンは同じです l = 4 メートル、床スラブあたりの支持セクションの長さ 私」 = 0.38 m. 床スラブの分布荷重 1\u003d 500 kg / m、レンガの壁の重量からの分散荷重(レンガのブランドと構成、石積みの高さ、およびその他の理由によって異なります) q2= 4000kg/m。 そのようなスラブが、支持体にしっかりと固定された梁と見なされるか、またはヒンジ付き支持体の片持ち梁と見なされるかを確認する必要があります。 サポート上の瞬間は
M サポート = 4000 0.38 2 /2 = 288.8 kg m、
ヒンジ付きサポートの片持ち梁のスパンのモーメント
Mスパン\u003d 500 4 2 / 8 \u003d 1000 kg m、
したがって、床スラブのスパンの最大モーメントは 711.2 kg m で、これは 333 kg m を超えるため、このような床スラブは、ヒンジ付きサポートを備えた片持ち梁と見なす必要があります。
ノート: このような床スラブをヒンジ付きサポートの片持ち梁と見なすと、断面を計算する必要がある最大曲げモーメントは 40% 以上になります。 ただし、最初の例のように、すべてがそれほど単純ではないため、補正係数を使用して、説明されていない状況を考慮することをお勧めします。
もちろん、ビームが置かれるサポートプラットフォームは個別にある必要があります
講義 #3
テーマ: " ロッドの断面における内力 "
質問:
1.サポートとサポート反応、およびその定義
3. 曲げモーメントとせん断力と分布荷重強度の関係
1. サポートとサポート反応、およびその定義
構造を計算する場合、主に曲げを受ける要素があります。 主に曲げ加工を行う棒をビームと呼びます。 ビームが荷重を受けてベースに伝達できるようにするには、サポート リンクでビームをビームに接続する必要があります。 実際には、いくつかのタイプのサポート接続が使用されているか、または彼らが言うように、いくつかのタイプのサポートが使用されています。
サポートには、主に次の 3 つのタイプがあります。
a) ヒンジ付き可動サポート:
b) ヒンジ固定サポート:
c) ハードクロージャー。
米。 1
図上。 図1は、ヒンジ可動支持体を示しており、このような支持体は、ビームが自由に回転し、水平方向に移動することを可能にする。 したがって、サポートの反作用は1つになります-垂直力。 このようなサポートの記号は右側に示されています。
米。 2
図上。 図2はヒンジ固定支持体を示す。 このようなサポートにより、ビームは自由に回転できますが、移動することはできません。 したがって、垂直方向と水平方向の力という 2 つの反作用が発生する可能性があります。 それらを合計して 1 つの合力を得ることができますが、それが向けられる角度を知る必要があります。 反応の垂直成分と水平成分を使用する方が便利です。
図上。 3 は固定終端を示しています。 ビームが回転したり移動したりすることはできません。 したがって、モーメント力、垂直力、水平力の 3 つのサポート反力が発生する可能性があります。 ビームの端にサポートがない場合、ビームのこの部分はコンソールと呼ばれます。
米。 3
ビームのサポートの反応を決定しましょう(図4を参照)。
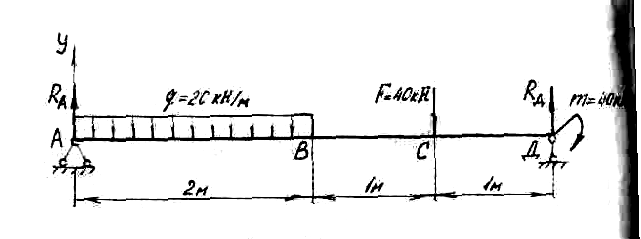
図4
サポート A では、分布荷重 q と集中力 F が垂直方向であるため、水平反力はゼロです。 サポート反応  上りましょう。 力の静的バランスの 2 つの方程式を構成してみましょう。 各サポートに関するモーメントの合計はゼロです。 この場合、1 つの未知数を含む方程式が得られるため、サポートに対してモーメント方程式を作成する必要があります。 点 B と点 C の方程式を作成すると、2 つの未知数を含む方程式が得られ、それらを解くのはより困難になります。 反時計回りのモーメントは正、時計回りのモーメントは負と見なされます。
上りましょう。 力の静的バランスの 2 つの方程式を構成してみましょう。 各サポートに関するモーメントの合計はゼロです。 この場合、1 つの未知数を含む方程式が得られるため、サポートに対してモーメント方程式を作成する必要があります。 点 B と点 C の方程式を作成すると、2 つの未知数を含む方程式が得られ、それらを解くのはより困難になります。 反時計回りのモーメントは正、時計回りのモーメントは負と見なされます。
どこ  均一に分布した荷重からのモーメント。
均一に分布した荷重からのモーメント。
仕事 qシステムの平衡状態から適用される距離までは、セグメントの中央に適用される集中力に等しくなります。 だからその瞬間 等しい:
 -力の瞬間 ふ
-力の瞬間 ふ
外部モーメント メートルそれは一対の力であるため、肩によって乗算されません。 大きさが等しく、一定の肩を持つ反対向きの力。
 .
.
チェック: 垂直 Y 軸上のすべての力の合計はゼロに等しくなければなりません:
 .
.
一瞬 メートル静的平衡状態に モーメントは大きさが等しく、反対方向の力であり、任意の軸への投影ではゼロになるため、書き留めないでください。
30-20-2-40+50=0:
80-80=0.
反応は正しく定義されています。
2.せん断力と曲げモーメント
梁に力を作用させる  、サポート反応
、サポート反応  . ゼロ端からの距離にあるセクションの内力を決定しましょう(図5を参照)。
. ゼロ端からの距離にあるセクションの内力を決定しましょう(図5を参照)。
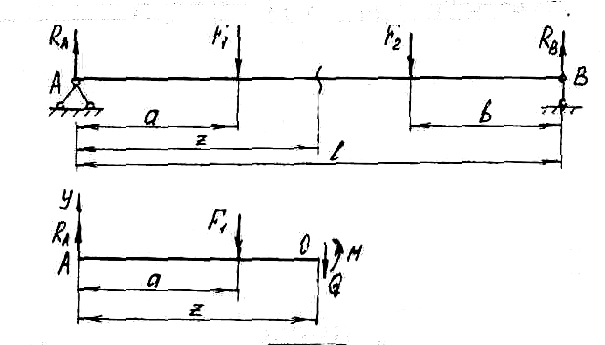
米。 五
すべての外力は垂直に作用するため、支持反力の水平成分 とならないだろう。 ビームは圧縮も伸長もしません。 断面の縦力はゼロです。 例を挙げると、 垂直方向にはなりません。 その後、サポートになります と 2 番目の反作用 - 水平方向の力、およびビーム セクションでは - 縦方向の力があります。 N. この場合、ビームは張力 (圧縮) に伴って曲げられます。つまり、 複雑な抵抗のケースになります。 後で勉強します。 最初に単純な問題を検討してから、より複雑な問題に進みます。その逆ではありません。
外力なので  ビームの軸を通過する同じ平面にある場合、トレックス内力の発生が可能です:曲げモーメント M、横力 Q
と縦力 N、前述したように、これはゼロに等しいです。 値 Mと Q
梁の左側の静的平衡の方程式から決定します。
ビームの軸を通過する同じ平面にある場合、トレックス内力の発生が可能です:曲げモーメント M、横力 Q
と縦力 N、前述したように、これはゼロに等しいです。 値 Mと Q
梁の左側の静的平衡の方程式から決定します。
結論:セクションの横方向の力は数値的に等しいすべての外力の代数和、および曲げモーメント セクションに関して計算されたすべてのモーメントの合計ビームの考慮された部分に適用されます。
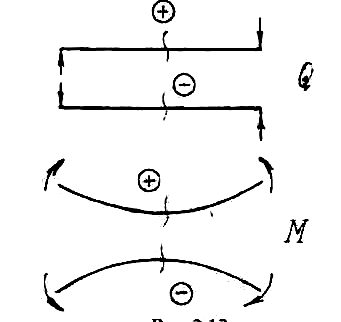
せん断力と曲げモーメントについては、必須の符号規則が採用されています (図 6 を参照)。
力が梁の考慮された部分を時計回りに回転させようとすると、正の横方向の力が発生し、逆に反時計回りに作用すると、横方向の力は負になります。 図上。 5強  ポジティブな原因 Q,
a
ポジティブな原因 Q,
a  - ネガティブ。 力の方向は、左側が正、右側が負になることに注意してください。 これは、ビームの右側と左側に作用する内力が必然的に等しく、反対方向に向けられなければならないという事実によるものです。
- ネガティブ。 力の方向は、左側が正、右側が負になることに注意してください。 これは、ビームの右側と左側に作用する内力が必然的に等しく、反対方向に向けられなければならないという事実によるものです。
外力または外部モーメントが梁を下向きに曲げると、結果として生じる曲げモーメントは正になり、逆に上向きに凸になると負になります。
米。 6
3. 曲げモーメントとの関係
横力と分布荷重強度
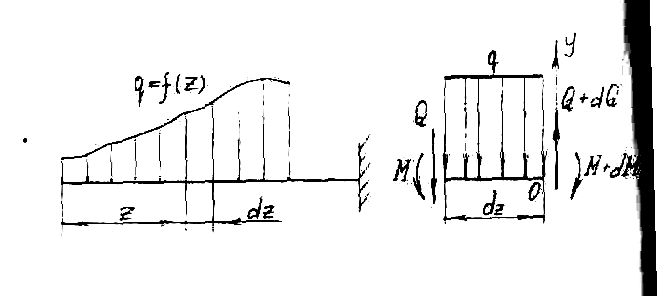
片持ち梁 (図 7 を参照) に、梁の長さに沿って変化する分布荷重がかかるとします。 遠距離で ぜ左端から無限小セグメントを取得します dz.
米。 7
次に、その分散負荷は定数と見なすことができます。 検討中のセグメントの左側には、内力があります Q と M、右側 - 内力の増加を考慮 Q+ dQ と M+ dM.
ビーム セグメントの静的平衡の方程式を作成しましょう。
 (1)
(1)
第 3 項は、高次の無限小値として無視できます。つまり、次のようになります。
変換後、次のようになります。
 (2)
(2)
それらの。 横座標 (ビームの長さ) に沿った曲げモーメントの 1 次導関数は、横方向の力です。
式(1)の場合、値を代入します Q 式 (2) から、次のようになります。
 , (3)
, (3)
それらの。 曲げモーメントの 2 次導関数は、分布荷重の強度です。
空間的な 個体 3 つの並進運動と 3 つの相互に垂直な軸を中心とした 3 つの回転運動の 6 つの自由度があります。 平らなボディには 3 つの自由度しかありません。つまり、2 つの軸方向の 2 つの並進運動と、3 番目の軸を中心とした回転です。 支持装置は、示された体の動きのいずれかを防止するか、または一般にその動きのいずれかを排除する。 参照デバイスは、ボディの参照ポイント (ノード) の変位に課される接続の数に従って分類されます。 接続は通常、本体を支持面に接続するロッドの形で表されます。 特に指定のない限り、サポート リンクとサーフェスは完全に剛体であると見なされます。
支持結合の側面から物体に負荷がかかると、支持反力と呼ばれる力が作用し始めます。 支持反応は、身体の平衡方程式から求められます。この方程式では、支持リンクが精神的に除去され、除去されたリンクに沿って向けられた力に置き換えられます。
にとって フラットボディ、特にフラット バーの場合、サポートの主なタイプは次のとおりです。 関節式, ヒンジ固定と 挟み込み固定.
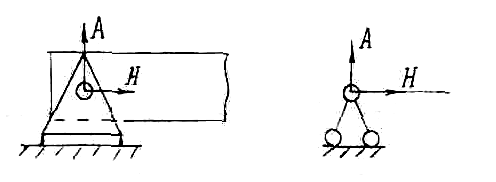
ヒンジ可動、言い換えれば、ローラーサポートはサポートユニットの動きを排除します と基準面に垂直な方向に回転しますが、基準点を中心とした本体の回転と、基準面に平行な並進運動を妨げません。 そのようなサポートは1つに対応します サポート反応支持面に垂直に向けます。 ころ軸受の模式図を図1に示します。 1.3。 サポート反応の方向も示されています。
米。 1.3。 関節サポート
ヒンジ固定、または、要するに、ヒンジ付きサポートにより、サポートアセンブリの並進運動が排除されます あ、ただし、基準点を中心としたボディの回転は妨げません。 そのような支持体の反応は、その方向が前もって知られていないため、通常、2 つの成分に分解されます。 Rバツと Ry、図に示すように、参照面に対して接線方向および垂直に向けられます。 1.4。 同じ図は、ヒンジ付きサポートの概略図を示しています。
米。 1.4。 ヒンジ固定サポート
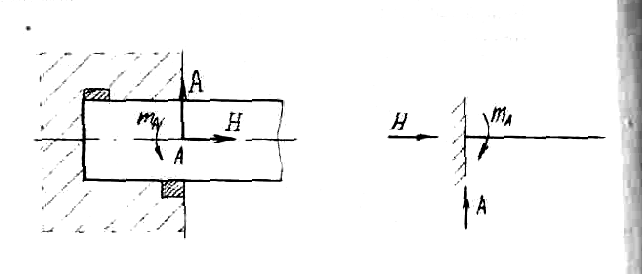
ピンチ固定サポート、または言い換えれば、終了(図1.5)は、身体の並進運動と回転運動を排除します。 体に課せられた 3 つの結合に従って、埋め込み反作用は力です。 処方箋と ライそしてアンカーポイント M. これらの各タイプのサポートデバイスの設計は非常に多様です。 図では。 1.3、1.4、および 1.5 の一般的に受け入れられているサポートの概略図は、それらの最も特徴的な機能を強調しています。
米。 1.5。 固定サポート